1. 引言
目前,单管IGBT的耐压能力还不足以满足高电压大功率整流器、逆变器、柔性输电等场合的需求。IGBT串联使用是一种提高耐压能力的有效方法 [1] ,而串联使用过程中,漏电流不一致、开关特性不一致、回路杂散电感差异、驱动信号延迟等众多因素会导致动态、静态不均压问题 [2] ,这成为了制约串联技术发展的关键。其中,针对驱动信号延迟的动态均压方法近年来受到研究人员越来越多的重视 [3] 。
文献 [4] [5] [6] 提出的RCD无源缓冲法是指在每个IGBT上并联电容、电阻、半导体二极管或它们所组合成的电路,通过减小IGBT开关瞬间电压的变化率达到均压的目的 [7] 。这种方法的均压效果由RCD元件的容量决定,且功耗与开关频率和工作电压等级成正比,因此在大功率高压高频应用场合中并不实用 [8] 。
文献 [9] 提出的变压器耦合同步法是将串联功率管的每一路驱动信号通过变压器耦合在一起,如果其中一路驱动信号发生了延时,由于耦合变压器的存在,驱动电流仍然一致。这样保证了串联IGBT栅射极电容电压同步增加从而实现动态均压。这种方法要求磁路漏抗非常小,否则会引起栅级震荡。
文献 [10] 提出一种门极补偿均压策略,通过提取当前关断周期门极驱动信号具体延时,在下一关断周期对驱动信号进行补偿以达到均衡电压的目的。这种方法原理上利用当前关断周期的延时对在下一关断周期进行预估性补偿,其可靠性有待进一步验证。
文献 [11] 提出一种自适应均压电路,通过静态均压电阻对IGBT端电压进行检测,电压超越预设限值后由RCD延时模块和三态门组成的时序控制电路对高电平驱动信号进行延时控制,以此消除过电压。该方法通过抑制过电压达到均压目的,但时序控制电路的调节能力取决于RCD元件参数容量,驱动信号延迟较长时均压效果不够理想。
在此背景下,本文提出了一种基于栅极控制的IGBT串联动态均压方法,通过延长密勒平台、降低集射极电压斜率提高串联IGBT动态电压一致性。较于文献 [9] ,门极控制回路杂散电感对该均压方法的影响小,不易发生震荡;较于文献 [10] ,该方法在当前关断周期电压不均衡时,进行即时的电压控制,可靠性高;较于文献 [11] ,该方法的电压调节能力不依赖于固定RCD元件容量,驱动信号延迟较长时,均压效果好。
2. 串联IGBT动态不均压机理分析
IGBT串联使用过程中,栅极驱动信号延时导致的不均压问题涉及导通和关断两个动态过程。由于不均压机理相似,所以限于篇幅,本文以关断过程为主进行分析,相应地,所提出的控制方法同样适用于导通过程。
2.1. IGBT的关断过程
为了分析关断过程串联不均压机理,首先应对IGBT关断过程进行详细分析。
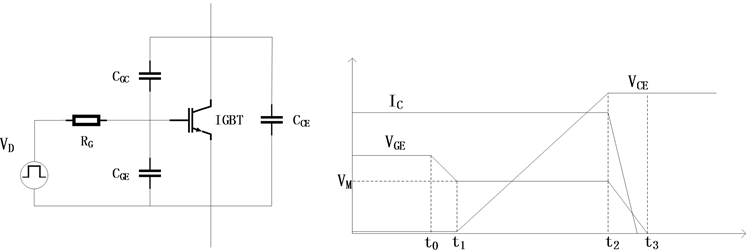
IGBT的关断过程可用图1(a)所示栅极等效电路进行分析。如图1(a)所示,RG表示栅极驱动电阻;VD表示栅极驱动电压;CGC、CGE、CCE分别表示栅极–集电极电容、栅极–发射极电容、集电极–发射极电容。其中,栅–集电容CGC又称为密勒电容 [12] 。
 (a) 栅极等效电路 (b) 关断波形
(a) 栅极等效电路 (b) 关断波形
Figure 1. Gate Equivalent Circuit and Turn-off Waveform
图1. 栅极等效电路和关断波形
对图1(a)中的IGBT栅极等效电路,其关断波形如图1(b)所示,VGE表示栅极–发射极电压,VCE表示集电极–发射极电压,IC表示集电极电流。忽略IC迅速降低导致的VCE电压尖峰,关断过程可简化为三个阶段:
阶段1(t0 − t1):t0时刻开始,驱动电压VD由正向偏置电压下降到反向偏置电压,栅–射电容CGE通过电阻RG进行放电,栅–射电压VGE随即下降,直到与密勒平台电压VM [12] 相等时,阶段1结束。在此期间,IGBT仍处于饱和区,电压VCE保持饱和导通压降不变,电流IC也不会随着栅射电压VGE下降而改变。
阶段2(t1 − t2):t1时刻开始,IGBT开始进入线性区,栅–射电压VGE保持密勒平台电压VM不变,集射电压VCE开始急剧升高,直到达到静态电压结束。之所以电压VGE在此期间保持不变,是因为栅射电容CGE在对栅极驱动电阻RG放电的同时受到密勒电容CGC充电,充放电迅速达到平衡后,栅射电压VGE将维持稳定不变,这一电压被成为密勒平台电压VM。根据文献 [13] ,密勒平台期间,IGBT集射电压斜率
为,
(1)
其中VD为栅极驱动电压;VM为密勒平台电压;RG为栅极驱动电阻;CGC为密勒电容;iG为栅极驱动电流。
阶段3(t2 − t3):t2时刻开始,IGBT退出密勒平台,栅射电压VGE继续下降,内部MOSFET的沟道开始消失,IGBT开始关断,集电极电流IC开始下降,随着栅射电压VGE进一步下降,沟道完全阻断,内部晶体管基极电流被切断,IGBT完全关断。
2.2. 驱动信号延迟导致的串联不均压机理分析
以上IGBT关断过程中,密勒平台阶段使得集射电压VCE从饱和导通压降快速上升到静态电压,是电压变化的动态过程,也是动态均压控制所重点关注的阶段。多只串联IGBT进行关断时,影响各单管IGBT间集射极电压VCE动态均衡的主要因素是密勒平台的开始时刻和持续时间以及集射电压斜率
。若串联IGBT间的各栅极驱动信号出现非同步到达栅极,则各器件将会先后进入密勒平台,并非同步结束密勒平台进入阶段3。对于提前进入密勒平台的IGBT,其集射电压VCE将提前升高,电压斜率
越大,电压上升越快,与尚处于阶段1的IGBT间的电压失衡就越严重。
3. 串联IGBT动态均压控制
基于上述分析,若对提前进入密勒平台的IGBT采取控制,降低集射电压VCE升高的斜率,并延长其密勒平台持续时间,使所有器件同步进入阶段3,则该IGBT与其余IGBT的集射电压动态一致性将得到改善。由式(1)可以看出,影响电压斜率的因素包括VD、VM、RG和CGC,其中密勒平台电压VM和密勒电容CGC受多种因素影响,不易控制,而栅极驱动电压VD和栅极驱动电阻RG属于外部参数,方便控制。下文提出一种均压控制方法,通过调节栅极驱动电压VD实现均压控制。
3.1. 串联IGBT动态均压控制电路
图2(a)为所提出的基于栅极控制的IGBT串联动态均压方法的结构框图,每一单元IGBT的均压辅助电路由静态均压电路、监测发信电路以及驱动控制模块组成。图中,R1、R2两只电阻串联后并接在IGBT两端,构成静态均压电路;齐纳二极管Z1和光耦D1串联后与R2电阻并联,构成监测发信电路,对IGBT的端电压进行监测并适时发出均压控制信号;驱动控制模块作为IGBT的驱动电路,在关断过程中出现电压失衡时,以光耦D1发出的光信号作为动态均压动作信号Vi,对栅极驱动电压进行调整从而控制端电压、实现动态电压均衡。
图2(b)为驱动控制模块的内部电路结构,输出驱动电压信号VD由通断控制信号Von-off和动态均压控制信号Vi共同控制。
 (a) 动态均压控制结构框图 (b) 驱动控制模块内部电路
(a) 动态均压控制结构框图 (b) 驱动控制模块内部电路
Figure 2. Dynamic voltage balancing control structure and internal circuit of drive module
图2. 动态均压控制结构框图和驱动控制模块内部电路
3.2. 工作原理
为了详细分析串联IGBT动态均压过程,首先对IGBT驱动电路的工作原理进行分析。
如图2(b)所示,忽略动态均压控制信号Vi,受光三极管Q3处于关断状态,栅极驱动电压VD完全由通断控制信号Von-off决定。当施加导通信号(Von-off为高电平)时,光耦D流过电流,其输出端子随即导通,正电源+VCC、负电源−VCC对R2放电,三极管Q1因基极获取高电位+VCC而导通,正电源+VCC通过Q1、R6施加到栅极,栅极驱动电压VD = +VCC,IGBT导通。当施加关断信号(Von-off为低电平)时,光耦D无电流流过、其输出端子呈关断状态,三极管Q2因基极通过R3、R2获取低电位−VCC而导通,负电源−VCC通过Q2、R5、R6施加到栅极,栅极驱动电压VD = −VCC,IGBT关断。
若IGBT串联模块关断过程中,驱动电路出现时延,驱动电压VD由+VCC到−VCC的下降沿非同时到达每只IGBT的栅极,VD下降沿提前到达的IGBT将提前进入密勒平台,其端电压将提前升高,出现电压不均衡现象,最严重的情况下,该只IGBT将独自承全部静态电压。
增加均压辅助电路后,端电压VCE经静态均压电阻分压后按比例施加到齐纳二极管两端,一旦超过由二极管击穿电压决定的门槛值,串联的光耦流过击穿电流发出动态均压控制信号Vi,受光三极管Q3导通,三极管Q1因基极获取高电位+VCC而导通,正电源+VCC将施加到栅极,栅极驱动电压VD开始升高,电容CGE通过电阻RG的放电过程受到抑制进而和密勒电容的充电平衡关系将持续更久,因此密勒平台得到延长,有利于所有器件同步进入阶段3。此外,由式(1)可知,端电压斜率
将随VD升高而减小,VCE在上升过程中受到抑制,从而降低与其余非提前关断IGBT端电压的差值。因此,整个非同步关断过程,由于关断信号提前到达的IGBT密勒平台阶段得到延长、端电压斜率受到抑制,各器件间的端电压动态一致性得到改善。
4. 仿真验证
为了验证所提方法的可行性和有效性,在matlab/simulink平台搭建了两管IGBT串联模型,如图3所示,直流电压VDC取300 V,并对驱动电压施加延时使串联IGBT间的各栅极驱动信号非同步到达栅极。图4为仿真波形。
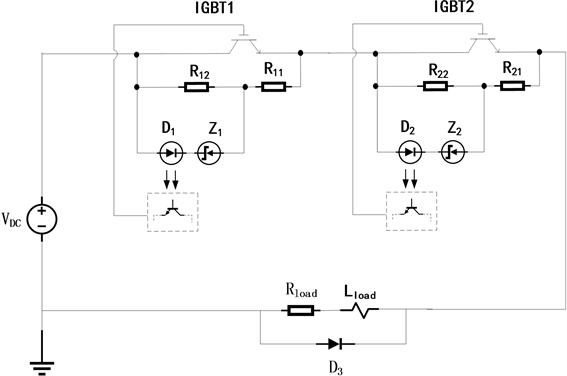
Figure 3. IGBT Series Dynamic Voltage Equalization Simulation Model
图3. IGBT串联动态均压仿真模型
图4(a)为采取均压控制时的IGBT端电压VCE波形,图4(b)是无均压电路时的端电压VCE波形,可以看出,增加了均压电路后,每一关断瞬态时的不均压程度都受到有效抑制。对第一次关断过程进行分析,图4(c)为无均压电路时栅射电压VGE波形,VGE1、VGE2因驱动电压延时而非同步下降,IGBT1将先行关断。无均压电路时端电压波形如图4(d)所示,此时串联器件的均压效果不理想,提前关断的IGBT1的端电压最高达到224.3 V,最大斜率达到143 V/us。若定义端电压VCE与静态电压VDC/2的最大差值百分比为电压不均衡度α%,那么未采取动态均压控制时,电压不均衡度α1%:
(2)
采取动态均压控制后的栅射电压VGE波形和端电压VCE波形如图4(e)、图4(f)所示,串联IGBT非同步关断过程中,IGBT1的集射电压VCE1提前上升。当超过门槛值Vref后,动态均压电路开始工作,VGE1密勒平台的持续时间约延长了0.37 us,端电压斜率降低到23 V/us,VCE1的峰值相较之前降到171.1 V。整个关断过程中,电压不平衡度α2%:
(3)
可以看出,仿真结果与前述理论分析结果相吻合,动态均压辅助电路能有效地改善驱动信号延迟导致的串联不均压现象。
5. 结语
本文详细分析了IGBT动态关断过程,并结合关断过程对栅极驱动信号延时导致的串联不均压机理进行了分析,在此基础上提出了一种基于栅极控制的IGBT串联动态均压方法,给出了该方法的电路结构和工作原理。仿真数据表明,提出的均压控制方法将电压不均衡度从49.5%降低到14.1%,能够有效减轻串联IGBT非同步关断导致的电压不均衡程度,并且均压控制回路简单可靠、易于实现。