1. 引言
近现代海洋石油工业发展迅速,在作业海域新建的石油生产设施越来越多,目前全球建设了超过10,700多座海洋石油生产设施,一般的海洋石油平台设计寿命是20年左右,平台设计寿命到期后,如果没有其他用途,那么必须废弃拆除 [1]。海洋石油平台拆除的目的是将已废弃的海洋石油平台运用合理、技术可行、设备可用、安全经济的方法进行原地弃置、异地弃置或改做他用,以保护海洋环境,使海洋恢复原貌 [2]。进入本世纪以来,我国陆续建设的海洋平台将大量进入废弃阶段,平台拆除任务艰巨。新的平台拆除技术也发展迅速,多船协同作业拆解平台在安全、经济、效率和适用范围方面具有优势。
在拆解过程中作业船舶在海上作业时会持续受到波浪、风和海流的影响,这些外部因素干扰会导致船舶在水平和垂直方向上移动,同时在导管架平台的整个拆解过程中,涉及到多船同步定位、举升臂同步托举、同步移船及平台协同下放作业,需要实时监测多个船体和导管架平台运动姿态,实现在指挥站位和作业位置实时监测各个船体、浮体的运动及姿态;同时为同步协同控制系统及其它相关系统提供输入,以实现同步实时控制多船体运动及姿态,并确保整个平台拆解过程中的可靠性和安全性。
2. 研究内容
目前世界上主流的船体运动监测方法分为非接触式运动测量、基于GPS的船舶运动测量以及惯性测量方法。
非接触式运动测量技术的发展以逐步融入了机器视觉、新型传感器和信息处理器等学科研究方向,前途广阔,国外非接触式运动测量的典型产品有激光多普勒测速仪和粒子图像速度计等,实时测量系统测量精度高、测量速度快,但产品价格昂贵,设备维护费用高 [3]。在这类产品方面我国尚处于模型试验阶段。高峰等人 [4] 基于船模六自由度运动的测量,结合实际测量的数据结果进验证了非接触式运动测量的可信性。
GPS载波相位测量技术起源于20世纪80年代,经过多年的发展利用GPS进行姿态测量已经成为GPS应用的一个重要分支,并且越来越多的应用于各行各业,特别是在航天和航海领域,该技术越来越多的被应用于飞行器或者舰船的姿态确定 [5]。
惯性导航是现代科学技术中一门尖端的技术学科,在航空、航天、航海的军事领域以及许多民用领域都得到了广泛应用。
本文根据多船协同拆解作业的技术要求和起重船及导管架平台的结构特点,研究一种适合实船和导管架平台安装条件的运动传感器、GPS、无线传输装置和数据采集装置等设备的安装及布置方案,以实现适合实船使用条件的多船舶运动、姿态和位置的实时同步监测。
3. 关键技术研究
3.1. 船体运动姿态测量
船舶运动姿态包括船舶六自由度运动、位置、航向及干舷高度。在平台拆解过程的起重作业中,船体六自由度姿态尤其是在多个船舶协同作业的情况下,对于起吊目标的稳定性和吊机的载荷均布有着关键的影响。同步测量协同作业船只的运动姿态时保证船舶联动控制及吊机载荷调整控制的实时性和准确性关键因素。
在海洋环境及外部载荷影响下,船舶会在六个自由度上产生位移,分别是围绕横轴的横荡(sway)、纵摇(pitch),围绕纵轴的纵荡(surge)、横摇(roll),以及围绕垂直轴的垂荡(heave)、艏摇(yaw)。
物体6自由度运动中包含3个直线运动、3个旋转运动,我们通常选用加速度计来测量直线运动,陀螺仪来测量旋转运动。
选用传统的传感器情况下,我们将在测量对象的坐标轴上分别安装3个加速度计和3个陀螺仪,传感器个体体积相对较大,安装布线工作繁琐,采用基于MEMS技术的传感器可以实现多轴测量集成在一个微小结构上。
微电子机械系统(MEMS)是将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。它采用微电子技术和微加工技术相结合的制造工艺,制造出性能优异的微型化的传感器、驱动器。
MEMS传感器与传统传感器相比具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,在微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。
MEMS加速度计采用质量块–弹簧–阻尼器系统来感应加速度,其结构如图1所示,图中质量块是加速度计的执行器,与质量块连接的可动臂和相对的固定臂形成的电容结构是加速度计的感应器,弹簧是有硅材料经过立体加工形成的力学结构,作用相当于弹簧。

Figure 1. MEMS Schematic diagram of accelerometer structure
图1. MEMS加速度计结构示意图
当加速度计连同测量对象一起加速运动时,质量块收到惯性力的作用向相反的方向运动。加速度固定时,质量块有确定的位移,加速度变化时,质量块的位移也发生相应变化,位移值对应感应器的电容值,通过感应器的输出电压信号可以测得加速度值。通过对实时获取的加速度至做积分运算可以得到实时运动速度进而得到直线位移。
3.2. 船舶位置测量
无线电测距定位,船舶的测距定位是依照三边测量定位原理来实现的,在船舶上设置主台,在岸上三个已知点上各设一个副台。通过获取船舶与三个已知点的距离,可以获取船舶当前位置数据。
三边测量法原理:
三边测量法在二维平面上用几何图形表示出来的意义是:当得到未知节点到一个锚节点的距离时,就可以确定此未知节点在以此锚节点为圆心、以距离为半径的圆上;得到未知节点到3个锚节点的距离时,3个圆的交点就是未知节点的位置。
三边测量法需预先获取定位锚点的二维坐标,锚点数量至少为3个。同时还需得到目标节点到锚点的距离信息。
由图2三边定位示意,根据三角几何公式,可以得出目标节点的二维坐标。
三角测量法与三边测量法思路大体一致,选一系列锚点,相互连接成若干个三角形,通过测量三角形的内角或(边长),再根据已知锚点的坐标和方位角数据,解算得到三角形各边的边长和坐标方位角,进而获取目标点的平面坐标。
当测量锚点(基站)及目标节点间测距误差较大,从而导致使用三边测量法是会出现三个圆无法交于一点的情况,这时需要使用MLE (极大似然估计法)。基本原理是寻找一个实测距离与估算距离偏差最小的点,作为目标节点的位置
3.3. 船舶航向测量
实时测量船舶航向数据,这对于船舶位置调整有很大帮助。船舶上选用电罗经、磁罗经来测量船舶航向数据。
本文采用电罗经是利用陀螺仪的定轴性和进动性,结合地球自转矢量和重力矢量,用控制设备和阻尼设备制成以提供真北基准的仪器。按对陀螺施加作用力矩的方式可分为机械摆式与电磁控制式两类陀螺罗经:机械摆式陀螺罗经按产生摆性力矩方式分为用弹性支承的单转子上重式液体连通器式罗经和将陀螺仪重心放在支承中心以下的下重式罗经;电磁控制式陀螺罗经是在两自由度平衡陀螺仪的结构上,设置电磁摆和力矩器组成的电磁控制装置,通过电信号给陀螺施加控制力矩。相对于磁罗经它不受外界磁场的影响,稳定性和准确性能高。
3.4. 数据同步采集与传输技术
在多船协同拆解作业过程中,实时采集的船舶和平台运动及姿态数据必须是同步的,以供指挥人员和作业人员的监视控制,实现拆解过程中的多船同步协调控制、举升臂同步托举动作和协同下放动作、双船同步移船等作业任务成功。同时由于涉及在多艘船舶和平台上进行信息采集与传输,无法采用有线采集传输方案,需要采用数据无线传输技术。
众多传感器的数据同步采用本地同步授时方法,即测量数据在发送前加入时戳信息,这样我们需要建立同步时统系统以及无线传输网络系统。
测量系统的各个装置的数据同步使用GPS时钟信号校正。它的工作原理是通过GPS卫星的PPS授时功能,提供100 ns等级的时钟信号来实时校准模块中处理器的RTC时钟模块,并将传感器的数据自动加上时间戳通过以太网或者WIFI回传至上位机服务器,并由服务器软件保存至数据库中。

Figure 3. Schematic diagram of timing network
图3. 授时网络示意图
由图3授时网络示意图可以得出,硬件系统配置为STA站点,通过AP或无线路由器进行数据传输。现场传感器数据通过不同接口(模拟量、通讯)发送至信号采集系统,同时系统配置GPS模块用于所采集数据的同步授时,信号传输系统再通过以太网通讯协议以无线或有线链路方式发送至服务器。
通讯协议使用标准TCP通讯。传输控制协议TCP (Transport Control Protocol)是一种面向连接的,可靠的传输层协议。面向连接是指一次正常的TCP传输需要通过在TCP客户端和TCP服务端建立特定的虚电路连接来完成,该过程通常被称为“三次握手”。可靠性可以通过很多种方法来提供保证,在这里我们关心的是数据序列和确认。TCP通过数据分段(Segment)中的序列号保证所有传输的数据可以在远端按照正常的次序进行重组,而且通过确认保证数据传输的完整性。要通过TCP传输数据,必须在两端主机之间建立连接。
为了能够支持同时发生的并行访问请求,TCP提供一种叫做“端口”的用户接口。端口是操作系统核心用来识别不同的网络回话过程。这是一个严格的传输层定义。通过TCP端口和IP地址的配合使用,可以提供到达终端的通讯手段。实际上,在任一时刻的互联网络连接可以由4个数字进行描述:来源IP地址和来源端口,目的IP地址和目的端口。位于不同系统平台,用来提供服务的一端通过标准的端口提供相应服务。
典型的TCP server PC端软件如图4所示。
数据采集硬件使用TCP CLIENT模式,RM04中提供完整的TCP协议栈,如图5所示。
数据采集硬件在该模式下,模块连接指定的IP地址及端口。所有从TCP Server端发送来的数据直接发送到串口端,串口端的数据发送到TCP Server端。异常的网络断开会导致模块主动重连。TCP主动重连功能使能(at+tcp_auto=1)情况下,TCP Server主动断开连接,模块会立即主动重连,否则模块不会重连(但是如果有数据发送,则会重新连接)。
其数据连接信息如表1所示。
4. 多船拆解作业实时监控总体方案设计
系统设计采用星形网络结构,有关联的测量子系统之间以串口通讯方式互联,子系统与主机通过以太网组成通讯网络,所有通讯数据均加入时戳信息。根据测量任务,系统在两艘起重船、运输船以及待拆除平台上均布置有相关测量和通讯设备,系统组成及具体布置如下图6~8及表2所示:
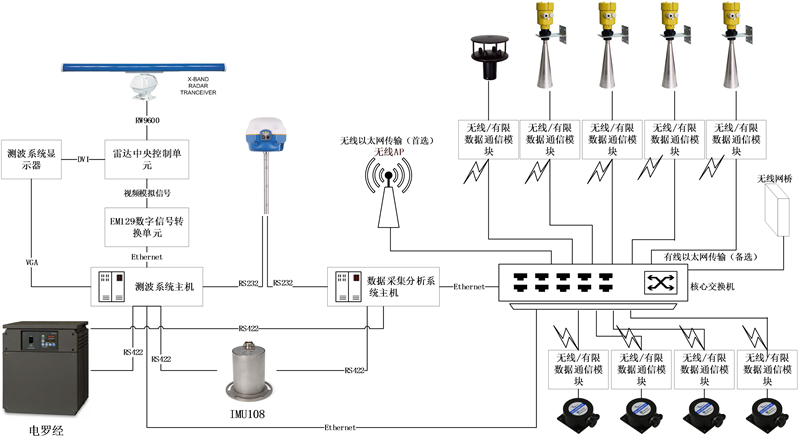
Figure 7. Block diagram of no. 1 crane ship system
图7. 1号起重船系统框图
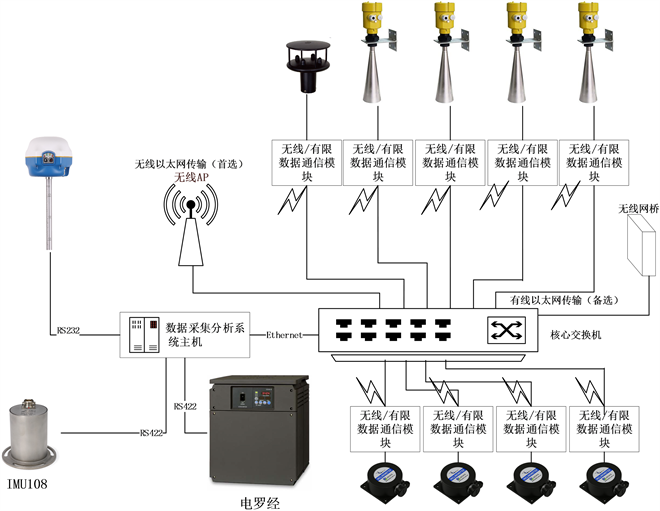
Figure 8. Block diagram of no. 2 crane ship system
图8. 2号起重船系统框图

Table 2. List of main equipment for data collection
表2. 数据采集主要设备清单
5. 总结
本文开发了一套满足作业设备以及拆解目标平台施工特点的实时同步检测方案。基于星状网络结构系统分配运动传感器、GPS、雷达测高仪等实现船舶运动姿态的检测,系统网络连接采用有线/无线复用功能,在布线条件有限时可使用无线+电池模式进行数据传输,实现了实时船舶运动姿态数据传输;并且各个吊臂安装倾角传感器实时监测吊臂的倾斜角度和运动速度,为拆解作业人员提供了数据支持,从而实现拆解作业的顺利完成。
基金项目
工信部高技术船舶科研项目“超大型海上油田设施一体化拆解装备关键技术研究”(编号:MC-201713-H02)。