1. 引言
随着铁路运输技术的不断进步,货运列车朝着重载化,开行高密度化的方向发展,但仍无法满足日益增长的货运需求,随着列车开行对数趋于饱和状态,仅开行2万t、万t重载列车已不能满足运量。朔黄铁路是我国重要的货运骨干线路,为进一步提高运量,在现行重载列车编组的基础上,优化行车组织,开行编组为1.6万t的混合编组列车。因编组方式以及牵引质量的改变,在列车运行过程中产生的纵向冲动及操纵方式,都不同于2万t列车,需要进行大量的线路试验。但重载列车线路实验费用高、周期长且在微调参数时由于受多种未知因素的影响,试验结果具有离散性,而计算机仿真具有成本低、效率高等特点,可实现危险工况的安全模拟,能够与试验互补 [1]。
国内外众多学者也曾开展大量列车纵向动力学建模及仿真的研究工作。Janarthanan开发了纵向动力学瞬态分析仿真模型,并将预测值进行比较,该模型可较为准确地预测重载列车在不同地形下的制动性能 [2]。Belforte开发了重载列车纵向动力学软件TSDyn,其计算结果可输入多体动力学软件MoNSTram仿真分析列车的纵向冲动与脱轨系数 [3]。耿志修通过建立重载列车运行仿真计算模型,研究了大秦线重载列车的牵引、制动等技术参数,为组织重载列车试验,制订合理操纵方法等提供了技术依据 [4];池茂儒等设计了一种新的循环变量算法,建立了三维空间耦合动力学模型以研究长大重载列车动力学性能 [5];翟婉明对列车动力学的计算方法进行研究,提出了一种“预测–校正”积分法和Newmark快速显式积分法 [6];魏伟基于气体流动理论和刚体动力学开发了列车空气制动与纵向动力学联合仿真系统(TABLDSS),该系统曾在2017年VSD期刊组织的国际纵向动力学软件的测评中,取得优异成绩 [7] [8]。
朔黄铁路所开行的1.6万t列车,采用“1辆HXD1 + 108辆C80 + 1辆SS4B + 66辆C64k”的交、直流机车及载重分别为80 t、64 t敞车的混合编组方式。文献 [9]、 [10] 曾开发了HXD1组合列车牵引与电制动模型,并与试验数据做了对比,得到了很好的验证。现根据SS4B型机车的真实参数及特性,建立其牵引力与电制动力的数理模型,进一步完善TABLDSS联合仿真系统。并对1.6万t混编列车通过朔黄铁路部分重要路段的工况进行仿真,将仿真结果与试验的相关数据进行对比分析来验证列车的基本运行阻力、线路阻力、SS4B机车牵引与电制动模型的准确性。
2. 列车纵向动力学模型
2.1. 列车动力学模型
列车由一系列机车与车辆组成,车辆(或机车)间由车钩和缓冲器连接。建立模型时将每个车辆(或机车)视为一个集中质量,车辆间由弹簧阻尼单元连接。其中任意一个车辆(或机车) i的受力如图1所示。其中xi、vi、Wi为第i辆车瞬时位置、速度和重力;
、FGi、FLi、FAi、FBi、FCi、FWi分别为第i辆车的瞬时惯性力、车钩力、牵引力或动力制动力、运行阻力、制动力、曲线阻力、坡道阻力 [11]。
对一节车辆i,可以列出运动方程
(1)
(2)
(3)
在有动力的机车车辆中,FLi根据牵引力或动力制动力特性曲线计算牵引力和动力制动力,没有牵引力和动力制动力的机车车辆FLi = 0。
根据朔黄铁路实际线路运行情况,利用蚁群算法,得到适用于朔黄铁路的车辆运行单位基本阻力模型如式(4),具体过程可参见文献 [12]。
(4)
式中:
为车辆运行单位基本阻力,kN;v为列车运行速度,km/h。
2.2. 列车运行阻力验证
为保证后续电牵引/电制动模型与实验验证时的准确性。首先以惰行工况对1.6万t列车的基本运行阻力和线路阻力进行分析验证,惰行运行为列车在机车电机没有任何输出的状态下,且不施加空气制动,仅依靠列车自身重力前进。此时列车仅受到自身的基本运行阻力,坡道阻力和曲线阻力。通过对比仿真与试验过程中列车在相同区间的运行情况,来验证列车运行阻力的准确性。
列车惰行运行工况选择位于朔黄铁路k112~k122处的区间,全长10,000 m。列车在惰行工况下的仿真与试验速度对比曲线如图2所示。图中坡道千分数为负值代表下坡。通过仿真与试验速度曲线对比,在k117+508处速度差值最大,为0.84 km/h,仅相差1.13%。仿真与试验结果基本一致,该系统中列车运行阻力与实际情况相吻合。
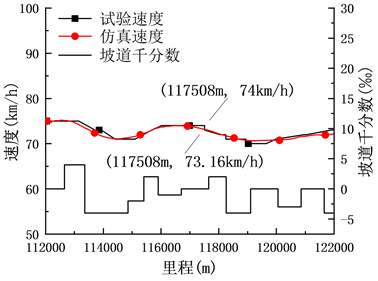
Figure 2. Speed of train simulation and experiment
图2. 列车仿真与试验速度对比图
3. SS4B机车牵引与电制动模型
3.1. 机车动力学模型
1.6万t混合编组列车采用了中车株洲电力机车研究所有限公司研制的TEC-TROMS无线重联同步控制系统 [13]。SS4B型电力机车是由中车株洲电力机车厂生产的8轴双节重联货运直流机车,用于牵引重载货运列车,能够满足在长大坡道上牵引重载长编组货运列车的运输需求。机车全长约32 m,总功率6400 kW,持续牵引力450 kN,最大电制动力382 kN,最高运行速度100 km/h,采用准恒速控制模式 [14]。由于SS4B机车控制方式为准恒速控制、HXD1机车控制方式为恒力矩控制且二者的功率、电气逻辑线路、辅助系统不一致等。因此1.6万t组合列车中不同控制方式的机车难以被直接混编互联控制。该编组在朔黄铁路实际运行中,以HXD1交流机车(主控机车)的操作为基准,转换为SS4B型直流机车(从控机车)的级位,来实现两台机车的电牵引和电制动特性相匹配。主控机车指令通过无线网络传输给从控机车;从控机车接收到指令后将其转成设定目标值,并送给机车数据处理中心进行整车的级位控制,从而实现与主控机车的匹配。
SS4B机车以恒流–准恒速控制来实现机车牵引特性,其牵引电机电枢电流Ia的给定特性直接反映电流随机车速度的控制关系,特性控制函数如式(5)
(5)
式中:n为调速手轮级位,v为机车速度,km/h,1096为牵引电机平均起动电流限制。
机车牵引力F为各动轮的轮周牵引力总和,牵引力与牵引电机电枢电流Ia的关系,表现为机车牵引特性如式(6)
(6)
式中:N为牵引电机总台数,ηc为机车齿轮传动效率,μc为牵引电机齿轮传动比,D为机车车轮直径,m,M为牵引电机输出转矩。参照“列车牵引计算规程”有关规定,韶山型货运系列电力机车黏着系数
如式(7)
(7)
以式(6)、式(7)参数绘制SS4B型电力机车牵引特性曲线如图3所示。
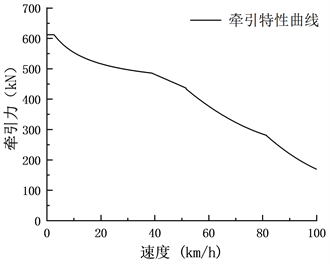
Figure 3. Traction characteristic of SS4B locomotive
图3. SS4B电力机车牵引特性曲线
SS4B机车电制动采用准恒速–制动电流限制的特性控制方式。机车制动特性按5个速度区进行控制,在0~10 km/h区段内,制动力呈线性增加,最小为39.76 kN;10~32.4 km/h区段为恒制动力加馈区;32.4~50 km/h区段为恒制动力励磁调节区,制动力达到382 kN;50~83.75 km/h区段为恒功区;83.75 km/h以上为高速换向限制区。机车制动特性曲线如图4所示。
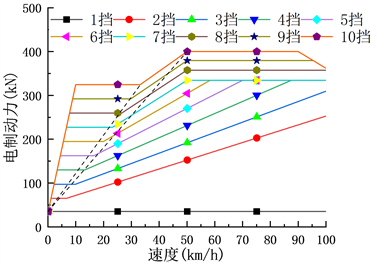
Figure 4. Electric braking characteristic of SS4B locomotive
图4. SS4B电力机车制动特性曲线
3.2. 机车电牵引与电制动仿真与试验验证
3.2.1. 机车电牵引模型验证
由于在k309~k324区间处,坡度较缓且无小半径曲线,在前序操纵中,于k311+800处曾进行列车紧急制动试验。待列车走行至k312+491处停车,并于该处进行列车牵引工况仿真与试验对比验证。仿真与试验速度对比如图5所示。
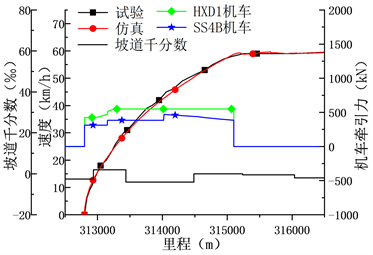
Figure 5. Speed of locomotive electric traction simulation and experiment
图5. 机车电牵引仿真与试验速度曲线图
列车在起动阶段,施加牵引力10~20 kN保持5 s,确保缓慢加载至200 kN不低于10秒,再逐步增加至500 kN。由于起动前期速度增加缓慢,列车位移较小,牵引力随里程变化曲线呈直线上升。图中HXD1牵引力和SS4B牵引力存在差异,是由于HXD1机车和SS4B机车牵引功率不同所致。在主控机车发出控制指令后,经过其数据中心转换,主控和从控机车达到操作同步。从控机车随速度的增加,牵引力下降是由于机车牵引特性导致。由此,机车电牵引的工况下,控制指令相同时,二者速度曲线重合度较高,仿真与试验结果相吻合。
3.2.2. 机车电制动力模型验证
在朔黄铁路k101+119~k106+933处进行机车电制动力仿真与试验对比验证,该区间全长5814 m,坡度由−10‰逐渐变为−2‰。仿真与试验速度曲线对比如图6所示。
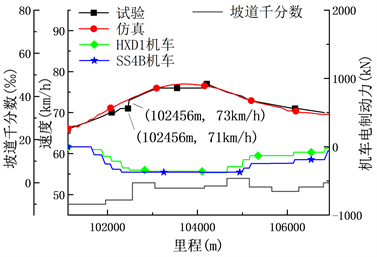
Figure 6. Speed of locomotive electric braking simulation and experiment
图6. 机车电制动力仿真与试验速度曲线图
在k101+635处开始施加电制动,不施加空气制动,由于该区间坡度较大,在列车进入该区间初期需要施加较大的电制动,待主控机车行驶至k104+208处,主控机车电制动由−370 kN逐渐减小,k106+827处机车电制动减小为0 kN。图中可见,在运行中HXD1机车和SS4B机车电制动力存在差异,是由于二者机车制动特性不同导致的。将仿真与试验结果进行对比,区间仿真平均速度为72.47 km/h,试验平均速度72.82 km/h,相差0.4%,在k102+444处,速度差最大2.73%。在机车仅施加电制动力的工况下,仿真与试验速度变化曲线基本一致。
4. 1.6万t混编列车各工况仿真与试验
4.1. 列车循环制动工况
朔黄铁路中大量的长大坡道给列车运行安全和操纵带来挑战,列车提速和高密度开行必须以保证安全为前提。重载列车行驶过程中,过大的纵向冲动会引起车钩断裂、列车脱轨、零部件磨损严重等一系列问题,尤其是在长大下坡道区段行驶时,列车运行所需的行驶操纵能力问题尤为关键。为进一步保证该模型准确性,选取朔黄铁路k20+70~k42+66处进行仿真与试验验证,该区间全长21,996 m,为连续坡度−10.2‰的典型长大下坡道。列车通过该区间时,为满足限速要求需采取多次空气制动并缓解并配合电制动的操纵方式,通过机车电制动配合列车空气制动的多次使用,使机车安全通过该区段。仿真与试验速度曲线对比如图7所示。
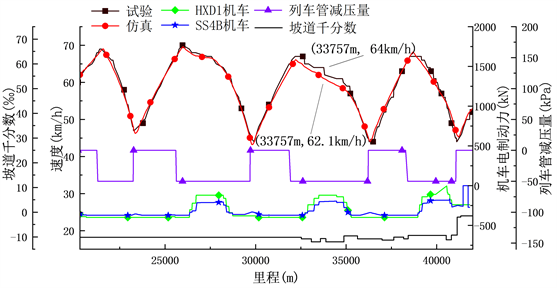
Figure 7. Speed of train cycle braking simulation and experiment
图7. 列车循环制动仿真与试验速度曲线图
在该区段列车采用四次空气制动/缓解通过,当列车行驶至k21+289处,k25+627处,k31+931处,k38+402处,分别施加空气制动进行调速,减压量均为50 kPa,制动初速约为67 km/h,缓解初速约为45 km/h。空气制动时,配合机车电制动力进行调速。在主控机车经过k40+352处时为过分相点,主控机车断电,电制动力为0 kN,从控机车电制动力保持不变。主控机车通过后恢复供电。从控机车在通过k40+352处,从控机车断电。在与试验操纵指令相同的情况下,将仿真与试验速度曲线结果对比,在第三次空气制动时(k31+931~k36+183处),二者速度略有差异,该位置平均速度差为2.78%;循环制动区间仿真平均速度为57.8 km/h,试验平均速度为56.8 km/h,相差1.76%。列车在长大坡道区间循环制动工况,仿真与试验速度变化基本一致。
4.2. 列车紧急制动工况
为验证列车制动性能,在朔黄铁路k311+800处进行紧急制动试验与仿真。在k309~k324区间内进行制动试验,由于该区间无小半径曲线,可保证试验安全性。列车处于坡道千分数为−2.5‰,2.0‰和−4‰的起伏坡道。列车紧急制动停车试验时,制动初速为79.2 km/h,制动距离691 m,制动时间51.6 s。仿真与试验结果对比如表1所示,仿真数据与试验数据,制动距离相差1.12%,制动时间总时长相差1.2%,基本一致。

Table 1. Emergency braking simulation and experiment data
表1. 紧急制动仿真与试验数据
4.3. 列车低速缓解工况
为测试列车在低速缓解时的纵向冲动,在朔黄铁路k27+239、k45+680处,分别进行2次施加不同电制动力的低速缓解试验。试验时列车制动初速在63 km/h左右,减压量为50 kPa,在列车制动过程中,k27+239处试验施加400 kN电制动,k45+680处试验施加200 kN电制动,缓解初速约28 km/h。详细操纵方式如表2所示。
Table 2. Release experiment at low speed
表2. 低速缓解试验
在选取的区间处,进行低速缓解试验,由于该区段坡度无变化,排除其他因素干扰,可较好验证仿真与试验结果。列车仿真与试验典型车位压钩力对比如表3所示。仿真数据与试验数据误差均在6%以内。该仿真系统能够较好地模拟列车运行时的纵向冲动。
Table 3. Coupler force of simulation and experiment
表3. 仿真与试验各车位压钩力
5. 结论
经过对多个典型工况的实验结果和仿真结果对比分析,SS4B机车牵引/制动仿真模型的准确性得到很好验证,结果如下:
1) 列车在惰行工况下,仿真速度与试验速度变化基本一致,验证了仿真系统线路基本阻力模型的准确性。
2) 列车在牵引工况下,仿真系统实现不同机车特性的模拟,仿真速度与试验速度二者重合度较高;列车在仅施加电制动力的情况下,仿真与试验平均速度相差为0.4%,速度相差最大时仅为2.73%,仿真与试验速度曲线吻合度较高。通过对列车牵引与电制动工况的模拟,仿真与试验的速度变化基本一致,验证了仿真系统SS4B机车电牵引和电制动模型的准确性。
3) 循环制动工况下,仿真与试验平均速度误差为1.76%,速度最大相差2.78%;紧急制动工况下,仿真与试验最大车钩力差值为2%;低速缓解时车钩力最大误差为5.37%,仿真数据与试验数据相差均在6%以内,证明了1.6万t混合编组列车模型的准确性与有效性。