1. 引言
在社会活动中,很多的任务都要通过几人合作来完成。只有合作任务中的每个主体都成功完成自己的分任务,团队任务才能成功;否则合作任务失败。而在这些合作任务中,不同原因主体的作用通常是不同的,会有主次之分。原因的作用是指原因在形成结果过程中所起的作用大小。例如,在一项戏剧表演的合作任务中,主角对表演任务的成败起主要作用;配角对表演任务的成败起次要作用。那么,在合作任务中,原因作用是否会影响人们的责任判断?先前的研究缺乏对此问题的考察。
责任判断可以分为前瞻性责任判断和回溯性责任判断。前瞻性责任判断是指,在结果发生前,判断原因主体对未来结果(成败未知)负多大的责任(Hart, 2008)。回溯性责任判断是指,在成败结果发生后,判断原因主体对结果负多大的责任(Gerstenberg & Lagnado, 2010; Lagnado & Channon, 2008; Robbennolt, 2000; Zultan, Gerstenberg, & Lagnado, 2012)。
对于前瞻性责任判断的解释主要有期待关键模型(the expected pivotality model)和简单启发式模型(the simple heuristic model)。期待关键模型基于Rapoport提出的前瞻性关键概念(Rapoport, 1987)。前瞻性关键是指:在事件发生前,改变某主体分任务的结果能够改变团队任务的结果,那么这名主体对团队结果是前瞻性关键的,要对团队结果负全部责任。期待关键模型预测,在合作任务发生前,主体的责任会随着主体数量的增加而减小。简单启发式模型预测,在合作任务发生前,不论合作任务中有多少主体,每个主体对合作任务的成功都是必要的,所以都是前瞻性关键的,都应负全部责任(Lagnado, Gerstenberg, & Zultan, 2013)。Lagnado, Gerstenberg, & Zultan (2013)对期待关键模型和简单启发式模型作了检验。他们用呈现合作任务简图的方式考察被试的前瞻性责任判断,如图1所示。
在图1中,A和B两人是合作任务中的原因主体,E是结果,箭头代表A和B参与的任务为合作任务。被试的任务是观看给出的图片后,判断主体对结果的前瞻性关键性程度。实验结果表明,在合作任务发生前,被试判断每个主体对结果都是前瞻性关键的,认为每个主体都要负全部责任。Lagnado et al. (2013)的实验结果符合简单启发式模型的预测而不符合期待关键模型的预测。
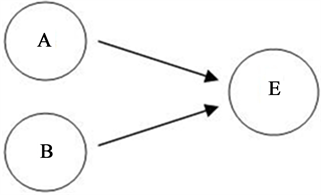
Figure 1. Diagram of the prospective responsibility judgment in the cooperation task
图1. 合作任务前瞻性责任判断的简图
对回溯性责任判断最有代表性的解释是结构模型(the structural model) (Chockler & Halpern, 2004)。结构模型认为,在合作任务中,责任的大小取决于从实际情境出发达到实现事件C对结果E是关键所需要的反事实改变的次数。这里的关键是回溯性的关键,是指合作结果E发生后,如果改变C就可以改变原有结果E,那么C对结果E是关键的,C要负全部责任。计算责任的公式为:Resp (C, E) = 1/(N + 1)。公式中,Resp (C, E)的含义为,某一原因C对结果E要负的责任;N的含义为,要使事件C对结果E是关键的,除C外,要改变其它原因事件的最少次数。例如,A,B和C三人合作完成一项任务。三人的分任务都失败,最终合作任务失败。依据结构模型,判断A的责任需要先计算出从实际情况出发到实现A对合作任务结果是关键的所需要的反事实改变的次数,即公式中的N值。如果把B和C两人的失败都在反事实上改为成功(即有两次反事实改变),那么A的成败就决定了合作结果的成败。此时,A对合作结果就是关键的,N = 2,Resp A = 1/3。同理,Resp B = Resp C = 1/3。如果三人的分任务都成功,最终合作任务成功。此时,结构模型预测,三人对结果都是关键的,每人都负有全部责任即1。总之,结构模型认为,合作任务失败时,每个主体平均分配全部责任;合作任务成功时,每个主体都要负全部责任。
Gerstenberg和Lagnado (2010)对结构模型进行了检验。其实验结果表明,合作任务失败时,分任务失败的主体平均分配全部责任;合作任务成功时,其中的每一个主体负全部责任。这看来支持结构模型。Zultan et al. (2012)的实验结果同样符合结构模型的预测。
Lagnado等认为,合作任务中的责任判断同时受到前瞻性关键性和回溯性关键性的影响(Gerstenberg & Lagnado, 2014; Lagnado et al., 2013)。他们先对期待关键模型和简单启发式模型的假设作了检验。结果支持简单启发式模型。然后,他们用呈现合作任务简图(如图2所示)的方式考察被试的回溯性责任判断。在图2中,“√”表示任务成功,“×”表示任务失败。被试在观看简图后,判断主体对合作任务的结果负有多大的责任。结果发现,结构模型对合作任务成功时的预测好于对合作任务失败时的预测。
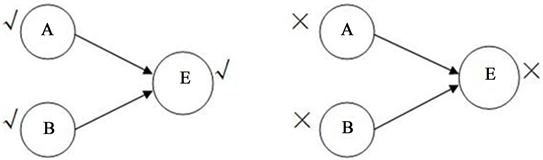
Figure 2. Diagram of the retrospective responsibility judgment in the cooperation task
图2. 合作任务前瞻性责任判断的简图
国内研究主要考察非认知因素(如责任判断时的情境、注意状况、责任的类型、当事人的角色、事件可控程度、行为动机以及原因的部位等)对责任判断的影响(况志华,2012;李安,2004;李鹏等,2015;林钟敏,2001;张爱卿,刘华山,2003),而没有考察认知因素(如原因的作用)对责任判断的影响,也没有考察合作任务中的责任判断。
总之,先前对合作任务责任判断的研究强调原因关键性对责任判断的影响。简单启发式模型和结构模型认为,对合作任务的前瞻性责任判断和合作任务成功后的责任判断,每个原因都要负全部责任。然而,这明显不符合人们的现实经验。在现实的合作任务中,多个原因主体的联合合力导致成功的结果。这决定了其中的每个原因只能分担部分责任,而不是负担全部责任。此外,原因的作用通常还有主次之分,主要原因比次要原因要承担更大的责任。先前的研究没有考察原因作用对责任判断的影响。根据这些现实经验,对有多个原因的合作任务(如一个医生和一个护士合作完成一个手术任务)的责任判断,我们做出如下假设:1) 人们的责任判断将遵循加法原则,即合作任务中所有原因的责任的总和等于全部责任。2) 对原因责任判断的大小方向会与原因作用的相对大小相一致。3) 原因在产生成功结果中的作用越大,其对成功结果的贡献越大,此时原因作用可有相对大小的区别。如对手术成功,医生比护士负有更大的作用或贡献,相应的也具有更大的责任;二者责任的总和应等于全部责任。4) 对失败的结果,由于每一原因的失败都能导致失败的结果,所以每一原因在导致失败结果中的作用是相等的,最终不同的原因将平均分担失败的责任。如对医生和护士两人操作都失败导致的手术失败,医生和护士应各承担对失败的一半责任,二者责任的总和应等于全部责任。在上述四个假设中,加法原则是限制责任判断的核心原则,其它假设都受加法原则的限制。这样,对合作任务的责任判断,上述四个假设形成以加法原则为核心的解释,我们称之为责任判断的加法解释。
本研究旨在考察合作任务中原因的作用对责任判断的影响,从而检验上述的假设。实验一考察对合作任务的前瞻性责任判断,实验二考察对合作任务的回溯性责任判断。实验均为纸笔实验。
2. 实验一
2.1. 方法
2.1.1. 被试
被试为某普通大学的在校本科大学生40人,其中男生10人,女生30人,被试年龄范围为17~20岁,平均年龄为17.98岁。
2.1.2. 材料
实验材料为一张纸的书面问卷。每份问卷包括四个题目。每个题目包括三个问题。问卷的版本之一如下所示。
指导语
请你阅读以下题目,按照要求回答其中的问题。对于选择问题,在你认同的选项上打勾来表示你的回答。对于估计问题,请用0%~100%之间的一个百分数表示你的估计,百分数越大表示程度越高。请按照题目顺序独立认真地完成。谢谢您的真诚合作。
1) 在外科手术时,Allen主要负责操作具体的手术操作。Bob则负责对手术器械进行消毒和递送器械材料等工作。现有一名患者需要做外科手术。此手术需要Allen和Bob合作完成。
a) 在此次手术中,Allen的重要性(小于等于大于) Bob的重要性。
b) Allen对手术成败负有多大的责任?()
c) Bob对手术成败负有多大的责任?()
2) 现在要把一个箱子从楼下搬到楼上。由于这个箱子很重,需要两个同样的工人Carter和Duncan一起合作尽力才能完成把箱子搬上楼的任务,搬运过程中,两人分别抬着箱子的左右两边。
a) 在搬运任务中,Carter的重要性(小于等于大于) Duncan的重要性。
b) Carter对任务成败负有多大的责任?()
c) Duncan对任务成败负有多大的责任?()
3) 双人自行车需要两个人共同踩踏用力来前行。坐在前面的人既要掌控方向和平衡,又要踩踏用力。坐在后面的人只需踩踏用力。现有Eric和Fisher二人需要共同骑乘一辆双人自行车,完成在规定时间内到达某地的任务,其中Eric在前面,Fisher在后面。
a) 在骑行任务中,Eric的重要性(小于等于大于) Fisher的重要性。
b) Eric对任务成败负有多大的责任?()
c) Fisher对任务成败负有多大的责任?()
4) 现在需要把一辆装有货物的平板车拉到一个山坡上,这需要两个同样的工人George和Hugo在前面并排拉车一起尽力才能实现。
a) 在拉车任务中,George的重要性(小于等于大于) Hugo的重要性。
b) George对任务成败负有多大的责任?()
c) Hugo对任务成败负有多大的责任?()
问卷中四个题目顺序按照反平衡的方法排列。一种顺序如上材料所示,另一半顺序是相反的顺序排列。在每种问卷中,原因作用相等的题目和原因作用不相等的题目交叉排列。
2.1.3. 设计
实验一采用单因素被试内设计。实验自变量是合作任务中两个原因的作用相对大小(作用相等和作用不相等两个条件)。因变量是被试对原因的责任判断。
问卷的四个题目分为两类:原因作用相等的题目和原因作用不相等的题目。这里的原因作用是指原因在产生成功结果中的作用。手术和骑行题目属于原因作用不相等的题目。另外两个题目属于原因作用相等的题目。每个题目包含三个问题。第一个问题要求被试比较两个原因的重要性,意在考察被试主观上能否知觉到题目中两个原因作用相对大小。其余两个问题要求被试对两个原因作相应的责任判断。
简单启发式模型预测,不论合作任务中两个原因的作用是否相等,每个原因都要负全部责任。而加法解释预测,在合作任务中,对其中原因的责任判断会随着原因作用的增加而增加,并且被试的责任判断将遵循加法原则,即所有原因的责任总和等于全部责任。
2.1.4. 程序
被试按照自愿的原则参加实验。问卷测试在一间安静的教室里进行。题目排列顺序不同的两种问卷按交叉排列的方式按顺序分发给被试。被试完成问卷的时间不限,实际完成时间大约为10分钟。发给每人一支笔作为礼物。
2.2. 结果与分析
实验一的结果如表1所示。在两个原因作用相等的题目中,所有被试(100%)认为两个原因的作用相等。在两个原因作用不相等的题目中,大多数被试(不低于70%)认为一个原因(Allen或Eric)的重要性大于另一个原因(Bob或Fisher)的重要性。被试能够正确地判断每个题目中两个原因作用的相对大小。这说明题目中原因作用相对大小的设置是有效的。在每个题目中,对每个原因责任判断的平均数的总和接近全部责任。这表明,被试的前瞻性责任判断一般符合加法原则。

Table 1. Results of importance comparison and responsibility judgment in Experiment 1
表1. 实验一重要性比较和责任判断的结果
对于原因作用相等的两个题目,被试一般认为作用相等的两个原因分别承担50%的责任,对两个原因作相等的责任判断的被试的比例(97.5%; 100%)显著大于对两个原因作不相等的责任判断的被试的比例(2.5%; 0%) (c2 (1) = 14.44, p < 0.005, W = 0.60; c2 (1) = 16.00, p < 0.005, W = 0.63)。对于原因作用不相等的两个题目,对主要原因(Allen和Eric)责任判断的平均数显著高于对次要原因(Bob和Fisher)责任判断的平均数(t (39) = 7.13, p < 0.001, d = 1.80; t (39) = 5.32, p < 0.001, d = 1.56)。这表明,前瞻性责任判断会随着原因作用的增加而增加。
总之,对合作任务的前瞻性责任判断符合加法解释的预测,而不符合简单启发式模型的预测。
3. 实验二
实验二包括实验A和实验B。两个实验分别考察合作任务失败(实验A)和成功(实验B)时原因的作用对回溯性的责任判断的影响。
3.1. 方法
3.1.1. 被试
被试为某普通大学的在校本科大学生80人,实验A和B各40人。实验A男生15人,女生25人,被试年龄范围为17~20岁,平均年龄为18.20岁。实验B男生13人,女生27人,被试年龄范围为17~21岁,平均年龄为18.13岁。
3.1.2. 材料和设计
实验二的材料是对实验一中材料的改编,即把实验一中合作结果不确定问题改编为相应的失败或成功结果问题。实验二问卷题目中只有责任判断问题,没有原因重要性的比较问题。实验A考察合作任务失败时的责任判断,实验B考察合作任务成功时的责任判断。实验A和实验B的题目示例如下所示。
合作任务失败题目:
在外科手术时,Allen主要负责操作具体的手术操作。Bob则负责对手术器械进行消毒和递送器械材料等工作。现有一名患者需要做外科手术。此手术需要Allen和Bob合作完成。
1) 在手术过程中,Allen未彻底切除病处的坏死组织,Bob工作符合规范。最终,手术是失败的,患者需要再次手术。
① Allen对手术失败负有多大的责任?()
② Bob对手术失败负有多大的责任?()
2) 在手术过程中,Allen操作符合规范,Bob对器械消毒不够,切口感染。最终,手术是失败的,患者需要再次手术。
① Allen对手术失败负有多大的责任?()
② Bob对手术失败负有多大的责任?()
3) 在手术过程中,Allen未彻底切除病处的坏死组织,并且Bob对器械消毒不够,切口感染。最终,手术是失败的,患者需要再次手术。
① Allen对手术失败负有多大的责任?()
② Bob对手术失败负有多大的责任?()
合作任务成功题目:
在外科手术时,Allen主要负责操作具体的手术操作。Bob则负责对手术器械进行消毒和递送器械材料等工作。现有一名患者需要做外科手术。此手术需要Allen和Bob合作完成。在手术过程中,Allen彻底切除了坏死组织,并且Bob对器械消毒彻底。最终,手术成功,患者痊愈。
1) Allen对手术的成功结果负有多大的责任?()
2) Bob对手术的成功结果负有多大的责任?()
对合作任务中两个原因作用相对大小的设计与实验一相同。
在合作任务中,两个主体分任务都失败时,结构模型和加法解释都预测,两个原因平均分配全部责任,即各承担一半的责任。在合作任务成功时,结构模型预测,不论两个原因的作用是否相等,每个原因都要负全部责任;而加法解释预测,对其中原因的责任判断会随着原因作用的增加而增加,并且被试的责任判断将遵循加法原则。
3.1.3. 程序
施测程序与实验一相同。
3.2. 结果与分析
实验二的结果如表2所示。在每个主体分任务都失败或成功的合作任务中,每个原因责任判断的平均数的总和接近全部责任。这表明,被试的责任判断一般符合加法原则。
Table 2. Results of responsibility judgment in Experiment 2 M (SD)
表2. 实验二责任判断的结果M (SD)
实验A的结果表明,在合作任务中,当两个原因一个成功一个失败时,失败的原因对合作任务失败负主要的责任。在两个主体分任务都失败的条件下,对于两个原因产生作用相等的题目,对两个原因作相等的责任判断的被试的比例(92.5%; 95%)显著高于对两个原因作不相等的责任判断的被试的比例(7.5%; 5%) (c2 (1) = 11.56, p < 0.005, W = 0.54; c2 (1) = 12.96, p < 0.005, W = 0.57)。这表明,在合作任务失败时,被试对作用相等的两个原因作相等的责任判断。对于原因产生作用不相等的题目:在手术题目中,虽然对主要原因(Allen)责任判断的平均数(61.2%)显著高于对次要原因(Bob)责任判断的平均数(52%) (t (39) = 3.11, p < 0.01, d = 0.47),但是有50%的被试判断两个原因分别承担50%责任,认为两个原因的责任是相等的。而在骑行题目中,对主要原因(Eric)责任判断的平均数与对次要原因(Fisher)责任判断的平均数的差异不显著(t (39) = 0.06, p > 0.05)。总体上,当合作任务中两个原因都失败时,被试对两个原因的责任判断差别不大,接近相等;二者的总和也接近全部责任。这符合结构模型和加法解释的预测。
在成功任务中,对于原因作用相等的题目,对两个原因作相等的责任判断的被试的比例(100%; 97.5%)显著高于对两个原因作不相等的责任判断的被试的比例(0%; 2.5%) (c2 (1) = 16.00, p < 0.005, W = 0.63; c2 (1) = 14.44, p < 0.005, W = 0.60)。这表明,在合作任务成功时,被试对作用相等的两个原因作相等的责任判断。对于原因作用不相等的题目,对主要原因(Allen和Eric)责任判断的平均数显著高于对次要原因(Bob和Fisher)责任判断的平均数(t (39) = 3.58, p < 0.001, d = 0.68; t (39) = 4.89, p < 0.001, d = 1.36)。这表明,在成功的合作任务中,责任的判断会随着原因作用的增大而增大,对其中两个原因责任判断的总和接近全部责任。以上结果符合加法解释的预测,而不符合结构模型的预测。
总之,对合作任务的回溯性责任判断,当合作任务中两个原因都失败时,被试对两个原因的责任判断一般是相等的,这符合结构模型和加法解释的预测。当合作任务成功时,被试对两个原因的责任判断的相对大小与原因作用的相对大小是相一致的,符合加法解释的预测,而不符合结构模型的预测。。
4. 讨论
实验一考察了对成败结果不确定的责任判断。其结果表明,对合作任务的前瞻性责任判断受原因作用的影响,符合加法解释的预测,而不符合简单启发式模型的预测。对合作任务的回溯性责任判断,实验B表明,当合作任务成功时,被试对两个原因的责任判断随原因作用的增加而增加。这符合加法解释的预测,而不符合结构模型的预测。实验一和实验B在责任判断的结果模式上是相一致的。这表明,当涉及到成败结果不确定和成功结果时,责任判断受原因作用的影响,符合加法解释的预测,而不符合其它基于关键性解释(简单启发式模型和结构模型)的预测。
实验A的结果表明,当由合作任务中两个原因都失败而导致结果失败时,被试判断两个原因各承担一半责任,责任判断的总和接近全部责任。这符合结构模型和加法解释的预测,不符合基于关键性的简单启发式模型的预测。这种结果模式意味着,被试能意识到两个原因中每个原因的失败都足以导致结果失败,认为每个原因失败对结果失败所起的作用是相等的。所以,当两个原因都失败时,结果失败的责任自然由导致这一失败的两个充分的原因来均分承担。
上述分析表明,被试对合作任务结果成功和失败有不同的责任判断机制。对于成功的结果,被试根据原因在产生成功结果中贡献作用大小来做相应的责任判断,所以责任判断随原因作用的增加而增加。此时,原因的作用是指产生成功结果中的贡献作用。而对于失败的结果,每个原因失败对结果失败所起的作用是相等的,被试判断每个原因对结果失败承担相等的责任。此时,原因的作用是导致失败结果中的作用。同样的原因在产生成功结果中的作用不同于其在导致失败结果中的作用。这导致被试对结果成功和失败表现出不同的责任判断模式。但是,成功和失败的责任判断模式都符合加法解释的预测。
现在的实验结果表明,不管是对合作任务的前瞻性还是回溯性责任判断,人们的责任判断一般符合基于加法原则的加法解释,而不符合其它基于原因关键性假设的解释。这是因为,合作任务中多个原因的联合合力导致结果,这一客观限制决定了人们的责任判断应该反映并符合加法原则,即多个原因的责任之和应等于全部责任。在加法原则限制下,对合作任务中某原因的责任判断,随此原因在导致结果中作用的增加而增加。基于原因关键性的简单启发式模型和结构模型预测每个原因承担全部责任,而现在的结果明显不支持这种预测。期待关键模型虽然预测对某一原因的关键性判断和前瞻性责任判断都会随合作任务中原因数量的增加而减少,但是此模型并没有提出前瞻性责任判断的加法原则,所以也不能预测解释现在的实验结果,特别是不能预测解释在原因数目确定的条件下责任判断随原因作用增加而增加的现象。总之,现在的研究表明,合作任务中的责任判断符合加法解释的预测。与其它基于原因关键性假设的解释相比,加法解释能够最大程度地解释现在的实验结果。
现在的实验结果不同于Lagnado et al. (2013)的实验结果。Lagnado等的研究支持简单启发式模型和结构模型的预测。在Lagnado等的研究中,对合作任务某一单个原因的责任判断接近全部责任。这可能是因为在其实验中,被试只需对一个目标原因进行责任判断,而不是对任务中所有的原因都进行责任判断,被试缺乏对多个原因责任判断的总和意识。因此得出同一合作任务的原因责任总和大于全部责任的结果。而现在的实验要求被试对任务中的两个原因都进行责任判断,被试容易形成责任总和的意识。因此被试的责任判断遵循加法原则。现在的实验结果与人们的现实经验是相一致的。
现在的研究也存在不足的方面。首先,现在的实验考察合作任务中的责任判断时,使用的都是包含两个原因的合作任务。未来的研究可考察更多原因的合作任务。其次,现在的实验考察的是对定性结果(成功或失败)的原因的责任判断。而有研究证明,除了结果的成败,结果的具体成绩也会影响责任判断(Gerstenberg & Lagnado, 2012)。未来的研究可考察结果是连续变量的合作任务。
5. 结论
本研究发现,不管是对合作任务的前瞻性还是回溯性责任判断,人们倾向于根据原因在导致结果中的作用来做相应的责任判断,责任判断随原因作用的增加而增加,并且符合加法原则。与其它基于原因关键性假设的现有解释相比,加法解释能够最大程度地解释人们对合作任务的责任判断。
基金项目
湖北医药学院人才启动金资助计划项目(2019QDJRW11)。