1. 引言
随着现代物流的蓬勃发展,物流运输问题逐渐成为了学术界的热点问题。在区域物流运输中,物流运输方式以卡车运输为主,在争抢客户和竞争资源时运输车队间产生了激烈竞争,因此研究车辆动态竞争系统显得尤为重要。由于车队服务对象不固定,不再是一家物流企业,而是同时服务于多家物流公司,在研究车辆动态竞争系统中,发现该系统与生物种群竞争关系有相似之处,从而进一步揭示了生物体的研究为经济社会发展的研究提供了科学方法。
文献 [1] 中针对两家实力相当的企业,建立了具有下临界点的企业竞争模型,考虑到企业产出水平具有最低限度,一旦低于该水平,企业将无法生存下去,并且企业还受到最大容纳量和经济社会环境的制约。在文献 [2] [3] [4] 中,都对物流运输系统以及车辆路径进行了动力学的研究,但仍有可以改进物流运输以及车辆调度的地方。在文献 [5] 中,作者给出一类企业竞争模型的分析方法,通过微分方程平衡点分析的方法给出可靠性的结论。类比于企业竞争模型,这些因素也同样应用到车辆动态竞争系统中来。本文将从两个物流运输车队之间的竞争入手,运用所学的微分方程知识,在动力学的视角下研究车辆运输系统的竞争状况。
2. 车辆动态竞争系统模型的构建
20世纪20年代,意大利生物学家U. D’Ancona在研究鱼类变化规律时,得到了第一次世界大战期间意大利Finme港收购站的软骨食肉鱼收购量的数据,并拿去请教了当时的同事,数学家V. Volterra。在假设种群数量的变化只依赖于两个种群的规模,不受其他种群和环境状态的影响的条件下,Volterra以此得到了捕食种群与食饵种群相互作用的数学模型,之后又得到了两种群相互作用的Lotka-Volterra模型,其一般形式为:
, (2.1)
其中,x,y的系数都是常数,
和
分别表示两种群的内禀增长率;
和
分别反映两种群的密度制约因素,称为种内作用系数;
和
分别表示两种群相互作用的因素,称为种间作用系数 [6] 。
鉴于上述模型可以用来描述种群的捕食与被捕食、竞争和互惠关系,但车辆动态竞争系统处于动态的变化中,在自身的发展和竞争中还受到经济等客观因素的制约,L-V模型的理论和方法不能满足研究的现实需要。因此,本文在改进Lotka-Volterra模型的基础上,首先讨论两家物流运输车队在发展初期的竞争关系,先做出以下假设:
设x和y分别代表两个车队进行物流运输服务的车辆数,是关于时间t的函数,假设随着经济社会的发展,在相当长的一段时间内,两家车队服务车辆的数量是逐渐上升的,并假设
和
分别是两家运输车队车辆使用数的增长率,考虑到区域物流货物的有限存储量,令M和N分别为区域物流运输中车辆的最大容纳量(饱和度),不妨假设
。由于物流运输是多家车队的博弈,在两家车辆竞争过程中,双方由于自身经济的困难限制了自身的发展,为对方提供了额外的竞争空间,设x和y失去的运输服务数量分别为
和
,由于两家是竞争关系,假设两家车队x和y的竞争系数分别为
和
,这里
,
,因为我们主要研究的是两家车队的竞争,所以在发展初期两家的竞争更多地以扩大自己的队伍为主,两家运输车队的车辆服务数量均有所增加,同时,双方在发展中也相互抗衡。由于问题的实际背景,我们仅在
内讨论该问题。因此,建立了如下的车辆竞争动态系统:
, (2.2)
这里
、
、
、
、
、
均大于0。
3. 车辆动态竞争系统平衡点分析
我们已经建立了车辆动态竞争模型,接下来进一步探讨模型的平衡点及其稳定性的情况,尝试揭示出车辆竞争关系间的内在作用机理。首先,将系统(3.2)变形为:
, (3.1)
令
, (3.2)
解得系统(3.2)的平衡点为
,
,
,下面对三个平衡点进行动力学性质分析。
3.1. 平衡点为原点的动力学分析
当平衡点为
时,则(3.1)的近似线性系统为:
。 (3.3)
因为
,
,
和
均为正数,我们假定系数矩阵为非奇异矩阵,则该系统的特征方程为:
。记
,那么,特征根为:
,
,
是显然成立的,那么我们只需对
讨论即可。
当
时,
,此时
,平衡点
为不稳定结点,此时两家车队的服务数量都在增加,说明在两家车队在竞争中相互促进发展。当
时,说明车辆运输企业在发展到一定阶段时,自身的增长率远小于竞争系数,主要通过竞争来壮大自己的实力和服务队伍。因此
,平衡点变为鞍点,此时一方物流运输车队服务数量的增加,将会导致另一方服务数量的减少,呈现出一方吞并的发展趋势。
3.2. 平衡点不为原点时的动力学分析 [7]
记
,
。那么,
,
,
,
。
1) 当平衡点为
时,系统(3.1)的线性近似系统的系数矩阵为
,
特征方程为
。
记
。下面对平衡点的类型进行分析:
① 当
时,此时有两个互异的特征根
,
,即
,
。
这里
,该平衡点为鞍点,此时,两家车队中一方的服务车辆数逐渐减少,另一方的服务数量在缓慢增加,逐渐趋于饱和状态。
② 当
时,方程的特征根为两个相等的实根
。此时
为稳定的临界结点,对应的轨线都趋近于
,说明竞争中x处于优势状态,y则处于劣势。
③ 当
时,方程的特征根
为共轭虚根,则
,
。
由于实部小于零,该平衡点为稳定焦点,当时间t趋于无穷大时,轨线趋近于
。
2) 当平衡点为
时,系统(3.1)线性近似系统的系数矩阵为:
。
特征方程为:
,记
。
由于
,
,所以这里
,并设两个特征根分别为
,
则可以得到
,
。
此时
,
为鞍点,由鞍点附近的轨线知y的服务车辆数先趋近于N,随着竞争对手的进一步发展,y的数量会减少。
4. 车辆动态竞争系统中的扰动与极限环
4.1. 扰动的车辆竞争动力学模型
由于两家车队处于动态竞争系统中,车队的发展一方面受到对手的排斥作用,另一方面还受到经济社会发展因素的制约,自身也存在抑制因素,这使得不同的运输车队虽然发展不均衡,但是在竞争系统内部存在着稳定的作用机制。进一步考虑系统(2.2)。
当两家车队在进行激烈竞争时,双方的主要矛盾是争夺对方的市场占有量,此时双方的内禀增长率在竞争系统中大致相等,我们假设此时
。由于双方的竞争,车队拥有的数量难以达到环境容纳量,可以将M, N也在车辆动态竞争系统中忽略,将双方的竞争作用函数加以改进,得到如下的动力系统:
。 (4.1)
这里
。
利用前面平衡点分析的方法,我们可以得出原点O为系统(4.1)唯一的平衡点,并且该平衡点为不稳定的焦点,说明两家车队在激烈竞争时,原点附近的轨线为对数螺线族,并成逆时针方向远离原点。
若将系统(4.1)进一步表示为:
。 (4.2)
将方程(4.2)的第一个方程两端乘以x,第二个方程两端乘以y,然后两式相加得到
。 (4.3)
利用极坐标变换
,
,由
得
。 (4.4)
其次,再将方程组(4.2)的第一个方程两端乘以y,第二个方程两端乘以x,然后两式相减,得到
。 (4.5)
由
,对两边进行微分得到
,于是原方程(4.1)经变换化为
。 (4.6)
从而可以得出(4.6)式有两个特解:
,
。其中
对应系统(4.1)的平衡点,而
对应系统(4.1)的一个周期解,它对应的闭轨线是以原点为中心,以
为半径的圆 [8] 。
4.2. 极限环分析
在相平面上,以原点为圆心,任意作一个半径为r的圆,考察方程组通过这个圆上任一点
的轨线的走向:
当
时,
,r是t的递增函数;
,
是t的递增函数。因此,随着t的增大,轨线按照逆时针方向从圆
上走出圆外。
当
时,
,r是t的递减函数;
,
是t的递增函数。因此,随着t的增大,轨线按逆时针方向从圆
上走进圆内。
综上所述得如下结论:
① 原方程组(4.2)有周期解:
;
② 闭轨线
是孤立的,因而它是一个极限环;
③ 此极限环的内外侧轨线均逆时针趋近于它,因而是一个稳定的极限环 [9] 。
从而说明两家运输车队处于一个相对稳定的动态竞争环境中,双方的竞争虽然激烈,但增长率具有周期性分布的特点,双方经过一段时间的竞争,运输车辆数的增长稳定分布在极限环附近。在经济社会发展稳定的前提下,双方的竞争促进了彼此的发展。
4.3. 数值模拟
针对上面讨论的情形,参照文献 [10] ,我们根据当地车辆竞争系统中的情形,对系统中的参数进行赋值,设
,
,
,利用MATLAB软件做出了系统的轨线分布图,可以清楚地看到极限环内外侧的轨线分布情况,如图1、图2所示。
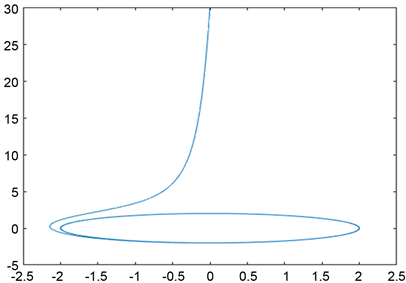
Figure 1. Distribution of the outer rail of the limited cycle
图1. 极限环外侧轨线分布图
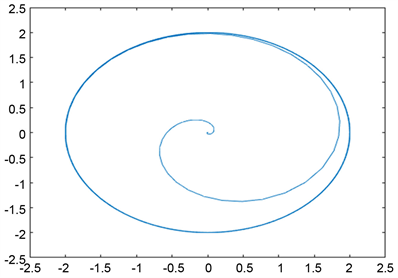
Figure 2. Distribution of the inner side of the limited cycle
图2. 极限环内侧轨线分布图
由图形可以看出,数值模拟的结果与前面讨论的情形一致,从而说明平衡点O是一个不稳定的焦点,当两家车队进行激烈竞争时,双方的相互对抗催生出一个极限环,两家车队在此极限环上共存,并一直展开竞争。并且根据轨线的分布情况我们得出该极限环是一个稳定的极限环,说明在激烈的车辆动态竞争系统中,两家车队存在长期的竞争并一直维持下去。
5. 结论
本文通过建立车辆动态竞争系统的动力学模型,分析得到了两家车队之间竞争的内在机理,运用微分方程定性理论,得出一些反映出车队发展前景的数学结论,对物流运输提供一些参考性的意见。
首先,两家物流运输公司在发展初期,主要受到经济社会发展水平和自身抑制因素的制约,双方的增长率会有所不同,当经济发展良好时,双方会抓住发展机遇,抢夺对方物流市场,并不断壮大成为有竞争力的运输公司。然而在区域物流中,允许物流运输车辆数的最大容纳量限制了车队不能无限制壮大,在发展后期,两家实力相当的运输车队展开竞争,主要以抢占对方的市场为主要竞争手段,从而出现了稳定极限环现象。在一段时间内,双方竞争一直存在,在自身发展的同时也推动了竞争对手的发展。
因此,车辆物流运输企业的发展主要依赖于自身的内禀增长率h和两者竞争的抑制系数m,当实力相当的两家企业尽可能地提高自身增长率和减少对手的牵制时,这样会实现极限环的跃升,极限环越大,对企业的竞争越有利,发展的空间也更加广阔。
基金项目
山东省自然科学基金(ZR2018MA016,ZR2015AL005),山东省软科学研究计划项目(2012RKA13021),临沂大学大学生创新创业训练计划项目(201710452001)。
NOTES
*通讯作者。