1. 引言
目前矢量水听器在拖曳声呐、声学浮标等海洋探测装置上得到了广泛的应用。水听器的工作原理主要是将水下的声音信号经过换能处理后转变为电信号,并传输到接收系统进行处理和识别。由于该装置的结构简单,在探测过程中很容易受到周围流体作用的影响,使得接收系统因流噪声而出现信噪比、分辨率以及数据质量下降的情况,极大地降低了水听器传感系统的换能效率。因此对流噪声成因和抑制方法的研究具有巨大的价值。
关于流噪声的理论基础,最早由国外学者在1964年开始研究。G. M. Corcos [1] 把湍流脉动压力看成空间上均匀,时间上广义平稳的随机过程,并且在波数–频率域上建立了平板表面的湍流脉动压力的二维谱模型。Carpenter A. L [2] 等在1983年基于Corcos的模型,建立了细长圆柱体表面的湍流脉动压力起伏模型,可以更精准的对流噪声进行拟合。近年来,Yongwei Liu和Dejiang Shang等 [3] 在2015年采用混响测量法表明水下的的涡流噪声不同于空气中的涡流噪声,水下由涡流产生的辐射噪声主要来自涡流过渡区,低频涡流产生高频噪声,而低频噪声则由大尺度涡流产生,同时流噪声的辐射功率主要取决于涡流源的压力。Nan Zou,Ing Nam Goh [4] 通过数值分析的方法得出比起传统的压力传感器,流噪声会对新兴的矢量型传感器的波束形成性能产生更加不利的影响。
但是由于水下环境复杂造成水下测量不便,因此现有研究 [5] 中对流噪声的实测数据仿真较少,还不能同时在理论和实验两方面上系统的对拖曳声呐水听器流噪声抑制与消除提供完善的指导,这阻碍了对流噪声研究的发展。
本文主要从理论分析、计算机模拟仿真以及实测数据验证三方面进行,利用波数–频率谱分析法、数值分析方法和matlab仿真方法,综合分析了流噪声的产生机理以及流噪声的功率特性,基于仿真结果对拖曳声呐线列阵的流噪声抑制算法提供了参考建议,并利用厦门市五缘湾水域的实测数据,验证了流噪声模型具有良好的预报效果。
2. 水听器流噪声场理论分析
常见的水平拖曳线列阵声呐的细剖图如图1所示。圆柱形的矢量水听器被封装在弹性护套内,当护套外表面受波浪作用而产生湍流起伏压力时,护套管内就产生了流噪声场 [6] 。
护套外壁处由于与海水相对运动产生湍流脉动压力
,利用二维空间上的傅立叶变换展开为波数–频率域上的二重积分:
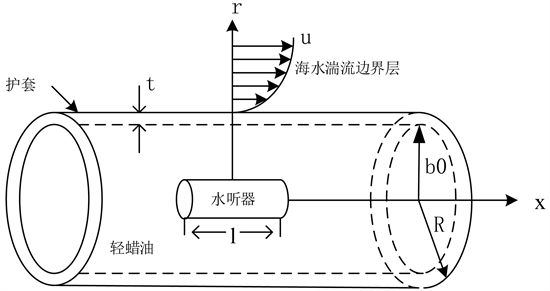
Figure 1. Subdivision diagram of common horizontal towed line array sonar
图1. 常见的水平拖曳线列阵声呐的细剖图
(1)
其中
为轴向波数,
为相应的波数–频率谱分量。整个护套内噪声场的系统响应可以用等效的波数–频率函数
表示,其物理含义是当护套外壁受到单位压力
时,整个护套系统在半径r处的响应。
是由整个系统特性所决定的确定性函数,这样护套内部噪声场的随机压力可以表示为:
(2)
同时得到随机压力的时-空相关函数表达式为:
(3)
其中,
为护套外壁所受到的压力起伏波数–频率谱,由于平稳随机信号的相关函数和功率谱密度互为一对傅立叶变换,因此由上式得到随机压力场的互功率谱密度为:
(4)
当
,
的时候,得到随机压力场的自功率谱
的表达式为:
(5)
可见流噪声场的自功率谱密度由两部分构成:一是TBL压力的波数–频率谱
;二是护套系统的传递函数
。
目前应用较多的压力起伏模型主要有Corcos模型和Carpente模型。其中Carpenter则在Corcos的基础上进行改进后提出了基于细长圆柱体表面的湍流脉动压力起伏模型,在波数域上的能量分布更加集中。故采用此模型。其表达式如下:
(6)
其中,c,b,h是可以通过实验进行修正的参数,其余参数值如下表1所示。

Table 1. Significance and value of Carpenter model parameters
表1. Carpenter模型参数意义与取值
水听器护套的声传播特性主要有Walker护套传递函数和和Linderman [7] 护套传递函数。Linderman函数表达式比Walker更加简洁,推导更加容易。并且Linderman护套传递函数在波数域上更加平滑,因此本文选用Linderman护套传递函数作为常规护套传递函数的良好近似。其护套传递函数表达式为:
(7)
3. 拖曳声呐水听器阵列流噪声仿真分析
在理想状态下,我们将圆柱形水听器受到的流噪声响应分为声压响应和轴向振速响应来分析。当护套外壁受到湍流脉动压力起伏谱的随机分量
时,长为l,半径为
且表面灵敏度均匀的圆柱形矢量水听器单位面积上接收到的随机压力表达式为:
(8)
其中
为水听器对声压的响应函数,表达式为:
(9)
圆柱形水听器受到的流噪声声压自功率谱为:
(10)
其中
,且
为整个护套系统对圆柱形水听器受到的流噪声的声压的传递函数。
同理得到圆柱形水听器受到的流噪声轴向振速自功率谱为:
(11)
其中
为第一类零阶贝塞尔数,
为水听器对轴向振速的响应函数,其表达式为:
(12)
3.1. 声呐拖曳速度对流噪声的影响
首先我们基于上述理论推导,使用matlab进行仿真分析各个参数对流噪声声压功率谱和轴向振速功率谱的影响。
理论上来说,随着拖曳速度的增大,水听器护套所受到的湍流脉动压力必然增大,那么传递给水听器的流噪声也会随之增大。图2、图3就显示了在其他模型参数保持不变的情况下,不同拖曳速度下圆柱形水听器受到的流噪声功率的情况。
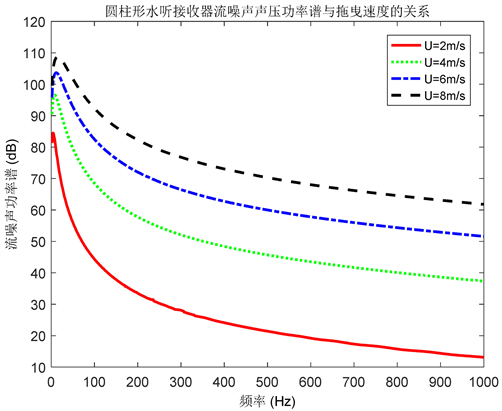
Figure 2. Relation between flow noise sound pressure power spectrum and towed velocity
图2. 流噪声声压功率谱与拖曳速度的关系图
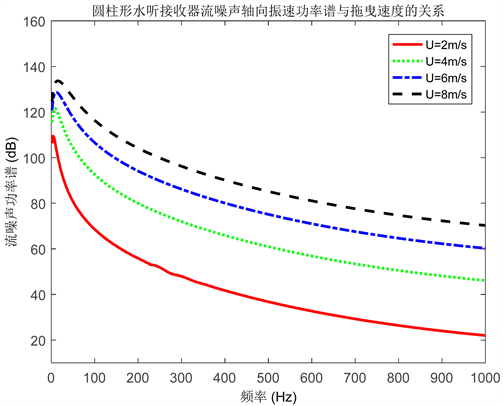
Figure 3. Relation between flow noise axial vibration velocity power spectrum and towed velocity
图3. 流噪声轴向振速功率谱与拖曳速度关系图
由图2和图3可以看出,无论是声压的自功率谱还是轴向振速的自功率谱,速度每上升一倍,谱级都会升高25 dB左右。随着拖曳速度的增加,一方面Carpenter压力起伏频率谱的谱级会增强;另一方面使得压力起伏频率谱的迁移峰向护套传递函数的峰值靠拢。
3.2. 水听器尺度对流噪声的影响
类似3.1小节,我们从理论上发现,水听器的灵敏度与其有效接收面积有关,在保持总灵敏度不变的情况下,我们通过matlab改变了圆柱形水听器的尺度 [8] 可以得到如图4和图5所示的流噪声响应自功率谱图。
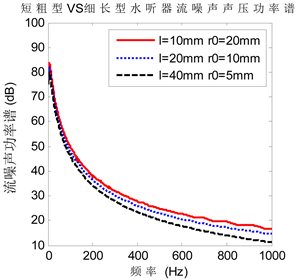
Figure 4. Sound pressure power spectrum of flow noise of hydrophone with different scales
图4. 不同尺度水听器的流噪声声压功率谱图
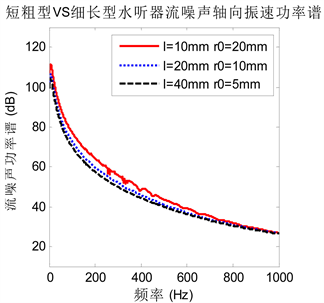
Figure 5. Axial velocity power spectrum of flow noise of hydrophones with different scales
图5. 不同尺度水听器的流噪声轴向振速功率谱
由图4和图5可以看出,在水听器接收总灵敏度保持不变的情况下,细长型水听器的流噪声谱级低于短粗型水听器流噪声谱级5~10 dB左右。因此,在进行拖曳声呐设计时采用细长型的水听器设计可以更好的抑制流噪声的影响。
3.3. 小结
由于理论中的参数过多,除了上述几个小节,我们对每个参数都进行了仿真,如水听器的护套参数等 [9] [10] ,使用matlab分析后各种参数条件下的流噪声响应变化总结如下表2所示。
Table 2. Flow noise response under different parameters
表2. 不同参数条件下的流噪声响应
4. 基于声学浮标的Carpenter压力模型实测验证
本章我们将使用简化的声学浮标测量模型,利用实测数据和计算机仿真结果进行对比来验证基于Carpenter模型的流噪声预报的准确性。
模型实测 [11] 主要有以下的调整:
1) 水听器一定的时间后浮标在垂直方向上的自身扰动运动会消失。
2) 声学浮标流噪声功率谱模型相比于前文研究的拖曳线列阵模型来讲更加简化。
3) 不考虑护套传递函数和径向传播约束,即只需要考虑TBL压力起伏模型和水听器的响应函数。
表达式为:
(13)
其中
为Carpenter压力起伏模型波数–频率谱表达式,
为水听器响应函数。
(14)
由于声学浮标中水听器的布放方式和运动状态都和水平拖曳线列阵不同,就要对现有的Carpenter模型中的参数c、b、h进行修正,其余参数如表1中不做改变。我们设定垂直拖曳电缆的半径R = 0.02 m,单个水听器的长度为l = 0.15 m并保持其他的参数不变,带入式14中,得到不同参数下的流噪声功率谱,如图6所示。
由图6的图(1)看出参数c对流噪声谱形状的影响不大,主要影响流噪声的谱级大小。
由图6的图(2)可以看出参数h越大,对应的流噪声谱的斜率越平坦,但流噪声的最高谱级受参数h的影响不大。
由图6的图(3)可以看出随着参数b的增大,流噪声在低频段的衰减速度加快,噪声的谱级也相应增大。
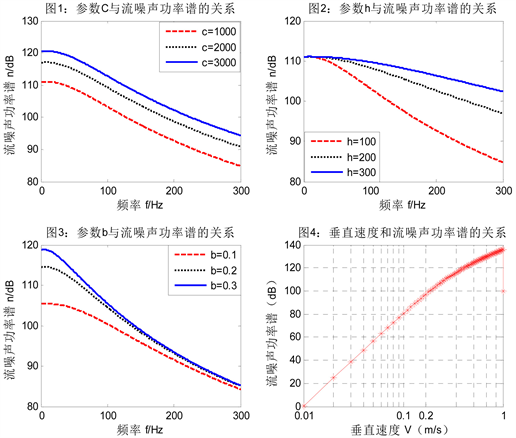
Figure 6. Power spectrum of flow noise under different parameters
图6. 不同参数下的流噪声功率谱
综合以上的仿真分析结果,经过多次比较后选定参数修正值为c = 3100,h = 100,b = 0.15。将修正后的参数值带入声学浮标的流噪声功率谱模型表达式中,得到流噪声功率谱和水听器垂直速度之间的关系,如图6的图(4)所示。当水听器的垂直速度大于0.2 m/s时,水听器垂直速度与流噪声功率谱为近似的指数关系。Arakeri [12] 和Legender [13] 的水听器速度能量转换为流噪声效率的研究,流噪声和水听器垂直速度的指数关系会变小,我们得出4.2左右的指数关系是合理的。而当水听器的垂直速度小于0.1 m/s时,流噪声和水听器垂直速度的指数关系超过7.5,我们设定参数如下:R = 0.02 m,l = 0.15 m,U = 0.7 m/s;并带入修正参数值后得到在水听器不同平均垂直速度为的情况下,得到的流噪声功率谱如图7所示。
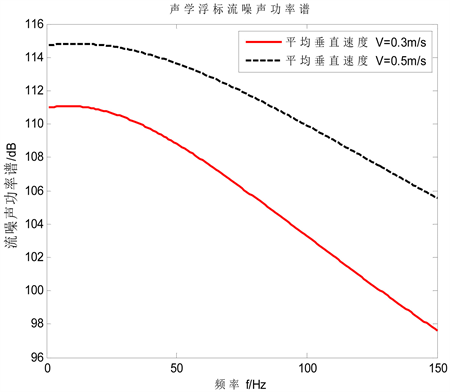
Figure 7. Acoustic buoy current noise power spectrum
图7. 声学浮标流噪声功率谱
由图,流噪声的能量主要分布于低频段,随着频率的增加以及垂直速度的减小,流噪声的谱级下降。
声学浮标流噪声的时–空相关函数的表达式为:
(15)
其中L为相邻水听器的轴向间距,
和
为水听器的轴向坐标,
为时间延迟;我们更关注声学浮标水听器的轴向相关特性,因此轴向窄带相关函数可以简化为:
(16)
经过仿真计算得到在分别改变水听器长度和频率并保持其他参数不变的情况下,水听器阵元间距与相关系数的关系如图8和图9所示:
由图可以看出,声学浮标水听器的相关半径随着水听器长度的增加而增加,当水听器长度约为15 cm时,声学浮标所受流噪声的相关半径为15 cm左右。而声学浮标水听器的相关半径与频率变化基本无关。通常情况下,由于声学浮标水听器的布放间距远大于流噪声的相关半径,因此可以认为相邻水听器接收到的流噪声是空间上不相关的。
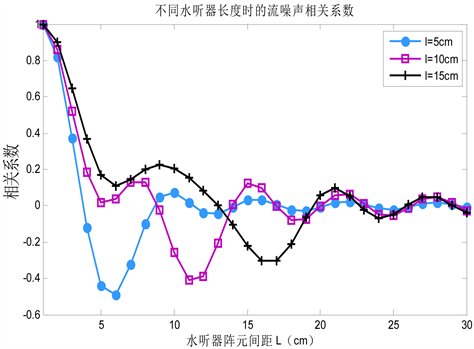
Figure 8. Correlation coefficients of flow noise at different hydrophone lengths
图8. 不同水听器长度时的流噪声相关系数
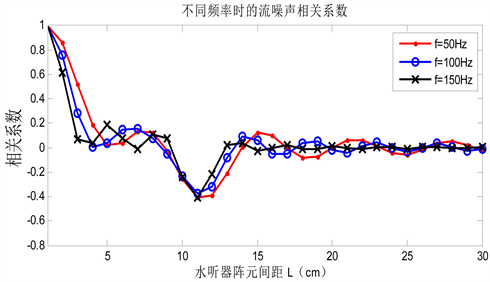
Figure 9. Correlation coefficients of flow noise at different frequencies
图9. 不同频率时的流噪声相关系数
最后我们将使用在福建省厦门市五缘湾水域进行的海洋环境噪声实验和实验室水箱测试数据来验证Carpenter模型的预报精度 [14] 。
五缘湾水域实验:将三组水听换能器分别放置在不同区域水下2米深度处,采样频率为153.6 kHz,采样时间长度为1分钟,水听换能器的晃动幅度为0.5米左右。
对测量得到的数据,截取4.5秒的数据,运用矩形窗,数据重叠率为30%,进行分段循环滑动FFT运算,得到三组水听换能器接收到的海洋环境噪声的功率谱,并同时与基于Carpenter模型的流噪声模型的功率谱预测值进行对比,结果由图10给出。
由实测数据的仿真结果可以看出,流噪声的功率谱在低频段具有较高的谱级,噪声谱级随着频率的增加呈现出下降趋势,这与流噪声模型的变动趋势一致。总体上看,实测数据的大小稍大于模型的数值,这是因为声学浮标测量的噪声数据中还包括其他噪声,如浮标线缆的机械噪声以及海绵的浪击噪声等等。因此,总的来说声学浮标功率谱模型可以较好的拟合实测数据仿真结果,基于Carpenter模型的流噪声预报在实际应用中具有较高的预报精度。
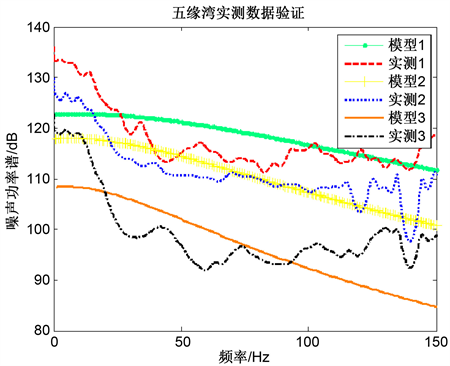
Figure 10. Comparison between measured data and model results in wuyuan bay
图10. 五缘湾实测数据与模型结果对比
由上图可以发现,通过在厦门市五缘湾水域的实测数据值与模型拟合结果进行对比,表明建立在Carpenter模型基础上的流噪声模型具有较好的预报效果。
5. 总结与展望
本文主要采用理论分析和部分流噪声模型仿真,得到了有效的抑噪措施,并通过实测数据验证了流噪声模型的有效性。将得到的抑噪措施总结如下:
1) 由于随着拖曳速度的增加,流噪声的谱级明显增加。因此在航行器航行的过程中,应在保持拖曳线列阵水平行进的前提下尽可能的降低拖曳速度。
2) 从水听器自身的尺度出发,可以适当的减小水听器的半径和增加水听器的长度,即可一定程度上可以抑制流噪声。
3) 在对水听器进行布放和封装时,要尽量保证水听器的轴线与护套轴线相重合,这样可以通过使得流噪声径向振速分量相互抵消而达到抑制流噪声的目的。
4) 采用水听器阵列组可以有效抑制流噪声。
最后,本文通过使用简化的声学浮标模型和在厦门市五缘湾水域的实测数据,我们得出使用Carpenter压力起伏模型来构建流噪声模型具有较好的预报效果和重要的工程应用价值。
基金项目
项目:深圳市科技计划项资助。JSGG20170414090428464。国家自然科学基金:61671394。
NOTES
*通讯作者。