1. 引言
随着国家经济的飞速发展要求以及我国西部地区水能资源极为丰富的特点,目前引水工程、水利水电枢纽工程建设正方兴未艾。乌东德水库坝址所处河段的右岸隶属云南省昆明市禄劝县,左岸隶属四川省会东县 [1]。乌东德水库的开发任务以发电为主,电站总装机容量10,200 MW,多年平均发电量393.4亿kWh。兼顾防洪,并具有拦沙等综合利用效益,是西电东送骨干电源点之一 [2]。乌东德水利枢纽由引水发电建筑物、泄洪消能设施、拦河坝等建筑物组成。引水发电系统布设于地下厂房,左、右两岸各布置6台单机容量850 MW的水轮机组;左岸靠山里侧布置2条导流隧洞,尾段与厂房尾水隧洞结合,右岸靠山里侧布置3条导流隧洞,其中2条尾段与尾水隧洞结合。挡水建筑物为混凝土双曲拱坝,正常蓄水位975 m,坝顶高程988.0 m,最大坝高265 m。乌东德水电站采用河床一次截流、土石围堰全年挡水、导流隧洞泄流的施工导流方式 [3] [4] [5] [6]。
乌东德水电工程为I等大(1)型工程,具有规模大、地质条件复杂、施工方法特殊等特点,给施工期的涉水测量带来了诸多困难。
1.1. 水力条件复杂
施工期导流洞、围堰等地下隐蔽工程的施工,造成了施测水域水体浑浊、大流量、高流速的水力特点,并大大缩短了施工期间的有效观测时间。水体内的人工构筑物复杂亦带来水流紊乱、水上通行安全系数骤降等不利因素。
1.2. 观测条件差
施工期岸线要进行围堰施工、岩体爆破、土方量堆砌或运送等作业,测量现场灰尘大,噪音高,通视条件差,给岸上地形测量带来了很大的不便。此外,受施工影响,还存在交通困难、控制点可靠性差等诸多困难。
因此,涉水测量必须解决施工现场灰尘大、噪音多、水下高流速流量等困难,并能短时高效的针对性作业。测量技术方案的选择与优化显得尤为重要。
2. 传统测量方案概述
传统的涉水水利工程测量方案普遍采用水深测量、陆上地形、水位接测外业同步施测,最后内业数据融合、处理。尤其受水利工程施工影响,水位变化较大,水位必须严格与水下同步实施。方案技术流程如图1所示:

Figure 1. Flow chart of traditional wading survey operation technology
图1. 传统涉水测量作业技术流程图
水深测量采用GNSS获取水深点的平面坐标(X,Y),同时配备单波束回深仪进行吃水改正后测量水深数据;最终通过各数据链将GPS定位坐标、水深数据、吃水等数据融合。水下地形采用预置计划断面线,计划线应与水流大致垂直 [7],即横断面法布线测量。
水下点的水深需经过水位高程计算才能确定其高程H,水位高程通常由全站仪架设在已知控制点上进行三角高程测量获得水面线的高程获得。三角高程测量的基本原理如下图2,A为地面上已知点,B为水位接测点,自A点观测B点的竖直角为α,S为两点间水平距离,i为A点仪器高,v为B点觇标高,则A、B两点间高差为:
[8]。

Figure 2. Schematic diagram of water level for trigonometric leveling
图2. 三角高程测量水位示意图
金沙江河道属于高山深谷型,山势陡峻,河谷深切,河道呈V字形,由于降雨量小,两岸植被稀少,覆土层较薄,极易掉落,行走、攀爬极为困难。因此,陆上地形主要采用免棱镜全站仪草图测记法测量,平缓沙滩区域可采用GNSS-RTK实施测量。但在地物复杂的水利工程区域存在一定的困难。总体上传统测量方案野外作业方法简单,形式单一,测量仪器有一定的局限性,实施过程中需要水下与水位各小组间须密切配合。
3. 方案设计与优化
3.1. 纵断面法布线
根据实际水流水力条件,水下测点布线改为顺岸平形水流方向布置,即纵断面法布线。选择在施工间歇期水流相对平缓时,采取测船在最靠近水利工程位置处往下游漂行方式测量,并适当加密点距、纵断面间距。遇到水流紊乱、壅水、回水、冒水形态时,通过测船动力适当调整断面线位置。在有不明水下构筑物或其他危险区域时,亦可采用散点法施测。
3.2. 一体化水深测量
一体化水深测量原理是通过GNSS测量水下点的平面位置的同时采集水下点的GNSS天线相位中心h1,天线相位中心至水面高度h2可量取获得。水下测点的真实高程H可以由以下关系式(1)求得:
(1)
一体化水深测量技术融合了GNSS、测深仪、便携式计算机等多种仪器设备和数据链平台,可实现所测即所得,无需测量水位和推算河底高程,减小了受近水利工程引起的水位变化引起的误差。目前相关的精度可靠性试验表明一体化测深技术已经日臻成熟,与传统方法比对试验亦表明,无验潮模式测深技术还可减少水面壅水、回水、冒水等复杂的形态造成的水位误差、人工架设水位误差等 [9]。
3.3. 三维激光扫描
三维激光扫描技术作具有非接触式测量、采集数据高效快速、高精度、高分辨率以及高度自动化等优势,近年来已被广泛运用到各项测绘工作以及其他领域。按测量方式可分为脉冲式、相位差式两种,其工作原理都是通过测距系统获取每个扫描点到扫描仪的距离S,再配合测角系统获取扫描的水平角α和垂直角ϕ,如图3所示。利用公式(2)即可计算出每一个扫描点(如p点)与扫描仪的空间相对三维坐标信息Xp、Yp、Zp,然后在扫描的过程中利用本身的垂直和水平马达等传动装置,完成对目标物体的全方位扫描,并最终获取扫描物体的点云数据 [10]。三维激光扫描仪还可搭载相机,扫测过程中同时进行了影像拍照,将影像资料附加至点云上,便可以得到调查点的三维实景图像。
(2)

Figure 3. Working principle of 3D laser scanner technology
图3. 三维激光扫描仪技术工作原理图
依据三维激光扫描仪测程和施工期的乌东德近坝区地形现状,可在测前先行规划测站扫描方案。在距离测区2公里以内,交通和通视条件较好的两岸公路上进行测站设置,在扫测区域内(也可布置在测区外)布置3个及以上的扫靶标点。利用GNSS获取测站点及三维激光扫靶标点的三维坐标。测站的设置要保证不同测站之间有一定的公共区域,方便进行点云拼接时能够利用公共平面直接拼接。如果测站点间公共平面不理想,则根据布设的扫靶标点进行点云拼接。
3.4. 优化方案实施
优化后的涉水测量方案主要内容有陆上地形扫测与水下地形漂测,减去了水位测量的环节。因此水下测量不受水位观测时机的限制,只受施工影响,外业测量时间安排弹性可控。陆上地形采用三维激光扫测,测站远离作业区,基本上不受施工影响,同时大大缩短了观测时间,提高了作业安全,与水下观测时间可分开择机进行。传统测量方案与优化方案对比如表1所示。
由表1可知,优化后的方案在外业工序上由于采用了无验潮三维水深测量和地面三维激光扫描配合数码相机影像采集技术,直接省去水位测量和草图测记两个环节;由此投入的技术人员也减少了5人,同比下降55%;外业完成时间为传统测量方案的一半,工作效率提高100%;内业完成时间其中水下地形数据直接得到的是三维坐标,时效性提高了20%,三维激光技术成果为点云数据,内业工作量较大,因此整体增加了35.7%。

Table 1. Comparison of traditional and optimal measuring schemes
表1. 传统测量方案与优化方案比对表
优化后的方案采用水流方向漂测方法,水下空白率大大减少,成图图件更加符合任务书和技术设计书要求,详见下图4效果图。
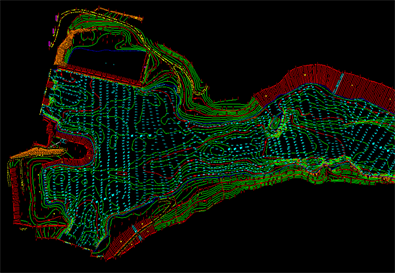
Figure 4. Digital line graphic based on optimized scheme
图4. 基于优化方案的数字线画图
4. 结论
乌东德水电站近坝区涉水测量方案通过优化作业方式方法、投入新仪器新技术、重构技术路线等措施进行了优化设计。具有以下优点:
1) 采用无验潮模式进行水深测量将减少一组水位观测人员,也减少了内业推算人员的强度。一定程度上提高了工作效率,增加了项目工程的经济收益。
2) 采用无验潮模式其结果与水位无关联,该模式可以完全消除上述两点引起的水位及风浪误差,同时还可消除测船涌浪、动态吃水引起的误差,从而进一步提高水下地形数据精度。
3) 陆上地形采用三维激光扫描技术非触源式作业模式,仪器替代了人员到达危险困难区域进行数据采集。一定程度上提高了测量技术人员作业安全系数。
在2017年汛后测次实施中效果良好,很大程度上规避了施工期间的各项安全风险,提高了涉水测量的工作效率。通过在乌东德水电站近坝区涉水测量中的成功运用表明,本测量方案优化设计可为施工期的水利工程空间数据获取技术方案提供经验借鉴。
参考文献