1. 引言
随着机动车保有量的不断攀升 [1],城市停车的供需矛盾日益突出,大规模建设路外停车场成为城市缓解停车供需矛盾的主要措施之一 [2]。停车位的增加可以在一定程度上缓解停车的紧张趋势,但由于路外停车设施出入口一般设置在通行能力较低的次干路或支路 [3],停车场进出车流量远超相连道路的抗干扰能力,甚至在某些高峰时段,等待进入停车设施的车辆排队长度过长而导致相连道路出现严重堵塞,严重影响相连道路动态交通的通行效率。
现阶段,国内外学者针对路内停车 [4] - [10]、公交站台 [11] [12] [13] [14] 对道路交通流阻滞效应的研究较多。魏家蓉 [14] 以路内停车路段为研究对象,基于VISSIM软件构建机非混行路内停车路段仿真模型,从微观角度分析路内停车行为的交通影响因素以及对主路交通流影响的显著程度。Salini等人 [15] 构建速度预测模型分析了公交停靠、行人干扰及路内停车这三种常见因素对道路交通流特征的影响。在对交通拥堵传播规律的研究方面,学者们建立了各种模型,如元胞自动机模型、车辆跟驰模型、流体力学模型等来揭示拥堵的本质,在宏观层面 [16] [17],以交通流整体为研究对象,分析道路上车辆的密度和速度随时空演化的关系,将交通拥堵视为交通流压缩、阻滞再到扩散的过程;而在微观层面 [18] [19] [20],以车辆为基本研究单元,更加关注车辆间的冲突、排队和疏散。
综上所述,虽然拥堵传播的相关理论成果丰富,但是对于路外停车设施对道路影响的研究还较为少见;此外,单纯依靠仿真模拟的拥堵分析方法常会因为理论假设和参数设置等问题导致失真,难以反映道路拥堵传播的真实状态。针对上述问题,本文在交通流实测数据的基础上,对偶发拥堵的停车场出入口区域进行分析,建立空间稳健自回归模型,并结合复杂网络等理论,提出一种中微观视角下的停车场出入口区域拥堵演变分析方法和关键拥堵节点的识别方法,以便为交通部门解决拥堵问题提供决策依据。
2. 数据采集与处理
本文交通调查采用航拍法,利用防风无人机MAVIC_AIR2,在100~150米之间的高空以鸟瞰视角录制实验区域的交通状况(每次录制时长为10~15分钟,共计100次),构建针对特定飞行高度下的航拍车辆数据集,然后利用基于YOLOV5和Deep-Sort的开源车辆跟踪算法,实时监测移动车辆的位置参数,最后在输出轨迹的基础上获取目标车辆速度。
路段交通流的速度可以直观反映交通的运行状态。交通流受到路外停车场的影响,使其运行速度在不同的车道呈现出不同的状态。本文调查了研究区域内所有车辆的速度分布,分析不同车道的交通流速度分布特征。
如图1所示,车道1为最内侧车道受停车场驶入车辆影响较小,平均速度较为平缓,接近停车场(距离为0处)时,车辆减速行为较少;车道2车流的平均速度总体低于车道1,受到停车场的影响更为严重;车道3为最外侧车道,受停车场出入口直接影响,总体车速较低,车辆减速行为集中开始在停车场上游55米处。因此将研究区域划分为上游区域、停车场出入口区域及下游区域,如图2所示。

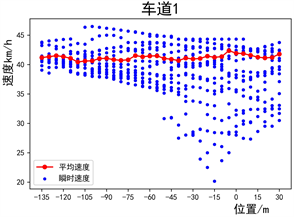

Figure 1. Speed distribution characteristics of road sections
图1. 路段交通流速度分布特征
3. 拥堵传播分析与关键节点识别方法
3.1. 空间稳健自回归模型
传统的空间自回归模型要求数据具有空间平稳性,然而受实际环境、交通状况等外界因素的影响,实测数据在空间上的平稳性往往较差。为降低外部因素对建模结果的影响,本文对传统空间自回归模型进行了改进,以研究对象的扰动作为因变量,而其他空间单元的扰动作为自变量,构建了基于重复观测数据的考虑空间不平稳性和多重相关性的稳健空间自回归模型,空间稳健自回归模型如式(1)所示:
(1)
式中,
表示研究对象速度当期扰动序列;k表示空间邻接数;K为考虑的最大空间邻接数;
表示空间滞后项
的回归系数;
表示考虑空间不平稳的k阶空间邻接矩阵,详细的构建方法见后文;
表示常数项的回归系数;l为常数项,k×1阶元素全为1的向量;
表示改进空间自回归模型的误差项。
通勤出行的周期变化特性导致了道路交通流也存在显著的周期性,因此基于此交通流周期性特征对数据进行平稳化处理。首先针对研究的空间单元可以通过构建前c个周期的历史序列(式2),从而获得各空间单元的速度扰动序列。
(2)
式中,
代表空间单元i在c个周期的速度数据;
是空间单元i的速度历史数据序列。
1) 速度扰动序列
国内《城市交通管理评价指标体系》中规定主干路机动车平均速度不小于30 km/h时,道路为畅通状态。因此可以对空间单元的速度历史数据序列进行标准化处理,以消除空间序列自身的空间不平稳。如式(3)所示,
为空间单元i的历史速度序列,
为历史速度扰动序列。
(3)
(4)
2) 考虑空间不平稳的空间邻接矩阵
由于空间单元在道路基础设施、与邻接对象交通流交换量等因素上存在差异,导致受到拥堵传播的影响也不尽相同,而传统的空间邻接矩阵都假设邻接对象间的权重值都相同,难以描述局部空间自相关的不平稳性。采用主成分分析法从
(
为与空间单元i有k阶邻接关系的空间单元的速度历史扰动序列组成的矩阵)中提取与空间单元i的速度历史扰动序列
(
为空间单元i速度历史扰动序列)最相似的第一主成分。
(5)
假设向量
为与空间单元i有k阶邻接关系的各个空间单元的权重值,为了确保空间单元i处的权重值能够反应其空间关联结构,
与
之间的协方差应该最大。
(6)
对其求解有:
(7)
中的值
反映了第r个空间单元和空间单元i在交通上的空间关联程度,其取值的正负反映该影响程度为正相关性或负相关性,且绝对值越大则相关性越大。在实际的交通流中,拥堵的传播一般为同向影响,因此根据上述优化得到的
中的正数部分来构建平稳化的空间邻接矩阵
(式(8)~(9))。
(8)
(9)
3.2. 参数估计方法
对于如式(1)所示的空间稳健自回归模型,其待估参数包括因变量矩阵
与空间滞后项
构成的自变量矩阵的回归系数。常用的参数估计方法有贝叶斯估计与最小二乘估计等方法。贝叶斯估计方法需要对参数的后验分布进行数值积分,计算过程较为复杂,因此本文选择最小二乘估计方法对参数进行计算。
在空间稳健自回归模型中,被解释变量为研究单元的扰动,解释变量为不同空间邻接数k下的扰动的空间滞后项
,将被解释变量矩阵
记为
,构建由空间滞后项组成的解释变量矩阵(见式(10))记为
。
(10)
1) 空间稳健自回归模型参数估计流程
① 主成分分析法的思路是通过降维来去除解释变量压缩消除冗余。从解释变量矩阵中提取第一主成分
,且
可由
线性表示(式(11)~(12)),被解释变量的第一主成分为
。
(11)
(12)
在主成分提取时,必须保证第一主成分
与
对应的特征值最大并且这两个第一主成分之间的关联性最大。因此选择协方差对主成分进行描述。
(13)
分别对
和
进行关于
的回归,如式(14)~(15)所示,式中
与
是残差矩阵。
(14)
(15)
根据上式与式(7),由最小二乘估计可得
和
关于
的回归系数
(式16)和
(式17):
(16)
(17)
② 同理,用残差项
和
替换
和
重复上述步骤,可以得到
和
的权重向量和回归系数。
(18)
(19)
(20)
③ 假设本次实验提取了h个主成分,则
与
之间的回归模型可以用式(21)~(23)表示。
(21)
(22)
(23)
其中,
为空间稳健自回归模型中被解释变量
组成的序列
与解释变量
组成的序列
之间的回归系数向量。
2) 主成分个数的确定
在一般情况下,偏最小二乘法并不需要用所有的成分
来构成回归模型,只需选用前l个特征值较大的主成分(
)。为了确保模型的有效性,可以通过交叉有效性检验确定建模所需的主成分个数l。
每次舍去第i个主成分(
),再用
个主成分构建回归模型,计算提取主成分个数为
时空间单元扰动的预测值与真实值之间的离差平方和
(式24)。并且考虑抽取i个主成分后空间单元扰动值拟合的回归式,计算预测值与真实值的离差平方和
(式25)。
(24)
(25)
在提取主成分时,比值
应该越小越好,因此设置限定值为0.05,定义交叉有效性为式(26),当
时,表明第h步提取的主成分边际贡献显著,需要继续往下提取主城份;当
时,表示模型的精度已经达到要求,无需继续提取成分。
(26)
3.3. 出入口区域拥堵演变分析方法
在空间稳健自回归模型中,以各空间单元速度的扰动作为被解释变量和解释变量,基于主成分分析法与偏最小二乘法进行参数估计。因此需要将模型中的参数定义为各空间单元速度扰动在空间上的传播结构。空间单元的扰动对其k阶邻接空间单元的影响,记为
,如式(27)所示。
(27)
本质上,拥堵的空间传播过程可以看作是局部空间单元拥堵的影响沿相邻单元逐渐向外扩散的空间过程。因此本文提出的停车场出入口区域拥堵演变分析方法主要可分为三个部分。
1) 拥堵空间传播效应
路段中任一空间单元的拥堵加剧,对其相邻单元的速度进行扰动,称为拥堵空间传播效应。空间单
元i对其k阶邻接单元的影响表示为
,且占到传播总效应的比例如式(28)所示。
(28)
2) 空间单元间的相互影响程度矩阵
空间单元速度的扰动是受到其相邻以及k阶邻接空间单元综合作用的,而且对于拥堵传播的影响也不相同。因此将空间单元j受到i影响而形成的扰动记为
(式(31)),进而计算空间单元i对空间单元j的影响程度(式(29)~(31))。
(29)
(30)
(31)
3.4. 关键节点的识别
复杂网络学科中将自身容易受损,且受损后对其他节点影响较大的节点称为关键节点。本文借鉴这一概念,提出出入口区域拥堵演化过程中关键节点的判别方法:将自身容易受到影响并表现为空间单元的速度下降较大且对临近空间单元速度影响较大的空间单元定义为出入口区域拥堵演变过程中的关键节点。
我国《城市交通管理评价指标体系》(2002年)以城市高峰时段主干路上机动车的平均速度定义拥堵程度,速度大于30 km/h表示畅通,速度在[20, 30]范围内时表示轻度拥堵,速度在[10, 20]范围内时表示拥堵,速度小于10 km/h表示严重拥堵。
综合上述关于交通拥堵的定义及已有研究成果将空间单元划分为5种状态:自发拥堵单元、传播效应下重度易堵单元、传播效应下中度易堵单元、传播效应下轻度易堵单元、具有免疫力的单元。具体分类标准如表1示。

Table 1. Traffic state definition of spatial unit
表1. 空间单元交通状态界定
其中,自发拥堵单元是在自身因素的影响下形成的拥堵,其余四种都是在临近单元拥堵传播效应的综合影响下,扰动急剧上升达到一定的阈值时交通状态由畅通逐步向拥堵转化,因此传播效应是导致出入口区域服务水平下降甚至拥堵的主要原因。
本文以出入口区域拥堵演变过程中关键节点的判别方法为基础,空间单元的速度扰动和空间单元间的相互影响程度为判别指标,将速度扰动大于10 km/h同时对邻近空间单元影响程度大于30%的空间单元定义为拥堵演变过程中的关键节点。
4. 实例分析
4.1. 模型拟合结果检验
对于所研究的某早高峰时段速度序列数据,运用空间稳健自回归模型进行拟合,并从拟合优度指标(R2)检验模型的拟合效果。结果表明,拟合优度(R2)为0.7423,表明该模型具有较好的拟合效果。
4.2. 出入口区域拥堵演变规律分析
为了研究出入口区域拥堵演变规律,运用本文提出的拥堵演变分析方法,选取路段流量为2000pcu/h、驶入率为20%的20组观测数据开展研究。通过计算出入口区域拥堵的传播效应和空间单元间的影响程度矩阵,进而得出区域内拥堵演变过程中的关键节点并解析其形成机理。
1) 出入口区域拥堵传播效应分析
基于表1的状态界定标准可确定出入口区域各个空间单元的交通状态,其空间分布如图3所示。通过对空间单元交通状态的分析,停车场出入口区域空间单元95、96、97是自发拥堵单元,是造成停车场接入路段发生局部拥堵的主要因素;这主要是因为车辆在驶入停车场时,减速、变道、停车等候等行为会引起道路上游车流速度变化,引发道路拥堵。拥堵效应以自发拥堵单元为起点内侧车道和路段上游两个方向进行传播,其中车道3受影响程度最高,受影响区域也最大,车道2其次和车道1受影响最小;出入口下游区域和受影响区域上游几乎不再受到影响。

Figure 3. Spatial unit state distribution
图3. 空间单元状态分布
通过对不同阶数邻接关系的5种不同交通状态的空间单元进行对比分析,进一步分析拥堵空间传播效应在不同状态空间单元间的传递特征,结果如图4所示。可以发现,随着空间邻接数的增加传播效应逐渐减小,而空间邻接数k < 4的总效应所占比例在90%以上。这表明空间单元发生拥堵时,对其紧邻的空间单元传递影响最大,而随着邻接数的增大,这种传递效应也急剧衰减。
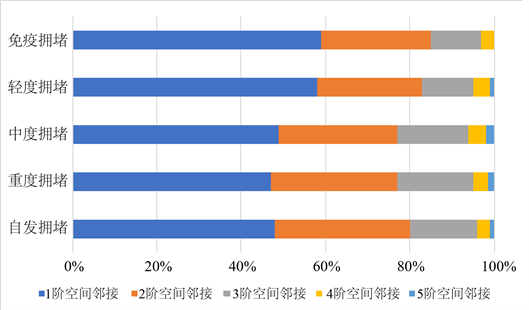
Figure 4. Attenuation process of spatial propagation effect
图4. 空间传播效应的衰减过程
2) 出入口区域拥堵空间演化机理
拥堵传播的过程主要集中在上游区域及出入口区域,因此本文主要研究这两个区域的传播过程。基于本文提出的空间稳健自回归模型对拥堵空间传播过程中各空间单元影响程度进行计算,并且以空间单元为节点,空间单元间的相互影响为边,相互影响程度为权重,绘制相应的有向加权网络,以识别路段中对拥堵空间传播演化影响较大的关键节点。
a) 出入口区域
图5为出入口区域的有向加权网络映射到空间单元的结果,图中的A、B、C分别表示车道1、车道2和车道3;C3、C4、C5为自发性拥堵单元,其他单元为一般单元。从图中可以发现,位于车道1 (外侧车道)上的空间单元受到的横向干扰占总干扰的85%左右,位于车道2 (中间车道)上的空间单元受到的横向干扰占总干扰的60%左右。车道3 (内侧车道)上自发拥堵单元形成拥堵的主要原因是停放车辆从出入口区域驶入停车场内部时,停车场服务能力不足导致产生排队情况,同时受到机非冲突的影响延长了停放车辆的驶入时间,最终形成出入口区域的自发拥堵并往上游以及内侧车道传播的现象。

Figure 5. Directed weighted network graph of entrance and exit area
图5. 出入口区域的有向加权网络图
b) 上游区域
出入口上游各空间单元间的有向加权网络如图6所示,上游区域各空间单元之间的权重值趋于稳定即拥堵的传播以相同的规律在路段上往上游传递。从图中可以看出,位于车道1上空间单元受到的横向干扰占总干扰的90%以上,形成这一现象的原因主要是车道1上车辆很少出现停滞现象,空间单元主要受到来自车道2“摩擦效应”的影响;车道2上空间单元受到的横向干扰在60%左右,这是因为出入口附近停放车辆间断的排队行为导致上游车辆常常出现停滞,因此同车道空间单元之间的相互影响较大;车道3是出入口直接接入的车道,受车辆排队和跟驰现象频繁出现以及停放车辆换道行为的综合影响,车道3空间单元受到的纵向影响程度和横向影响程度均在50%左右。

Figure 6. Directed weighted network graph of upstream region
图6. 上游区域的有向加权网络图
综上所述,从影响数值来看,拥堵传播效应在停车场出入口接入点区域最强,是拥堵产生的先发区域;过渡区的传播效应居中,是拥堵车辆的主要停滞区域;上游区域的传播相应偏低,车辆停滞现象较少,较为畅通。从影响占比来看,从停车出入口接入点区域到过渡区再到上游区域,纵向干扰效应的占比逐渐提升,而横向干扰效应的占比逐渐下降,这说明,拥堵的横向传播效应比纵向传播效应衰减更快。
4.3. 关键拥堵节点识别
为了进一步分析拥堵演变过程中关键节点发生的位置和数量与路段流量以及驶入率之间的关系,本文分别计算了路段流量为1500 pcu/h、2000 pcu/h、2500 pcu/h时停车驶入率为15%、20%、25%时拥堵传播的关键节点位置(如表2所示),显然,路段流量和驶入率均与关键节点数量呈正相关关系,且随着路段流量和驶入率的增加,关键节点位置遵循从停车场出入口接入点向上游路段,由外侧车道向内侧车道扩散的趋势。进一步对比分析可知:当路段流量为1500 pcu/h时停车驶入率的变化对关键节点数量的作用并不明显;当路段流量增加到2000 pcu/h (尤其是增加至2500 pcu/h时)随着停车驶入率的增加而引发的关键节点数量也显著增加,这说明驶入率对于关键节点的影响作用随着路段流量的增加而有所提升。
Table 2. Key nodes of congestion propagation
表2. 拥堵传播关键节点
通过以上分析可知,出入口区域空间单元拥堵的程度、分布以及数量是不断变化的。路段流量以及停车驶入率较大时,出入口区域空间单元拥堵的程度和数量会明显增大,反之则会减少。但就每一个具体单元来说,其是否成为拥堵单元并不是随路段流量或停车驶入率单调变化,而是在路段流量、停车驶入率和单元位置耦合作用下的变化。在出入口区域的有向加权网络中,有一部分空间单元(拥堵传播效应下的关键节点)随路段流量或停车驶入率的增加扰动急剧上升并演变为拥堵单元,还有一部分单元随路段流量或停车驶入率的增加扰动变化较小甚至不发生任何改变。因此,在日常的交通管理中,应针对演变过程中的关键节点进行疏导;针对自发拥堵单元通过提升出入口服务能力、减少停车驶入时间,从而降低自发拥堵单元对临近单元的影响;针对传播效应下的关键节点通过减少车辆停滞现象缓解拥堵在纵向上的传播;此外,可通过停车分级诱导屏等设施引导停放车辆从其他入口驶入停车场,降低出入口的驶入率。从而改善出入口接入路段的出行环境,提升市民的出行品质。
5. 结论
本文以研究停车设施出入口拥堵传播的空间演变规律为切入点,首先探讨了传统空间自回归模型的不足,结合出入口区域交通流的实际特征进行改进并提出了空间稳健自回归模型,而后基于主成分分析思想构建了平稳化的空间邻接矩阵、并基于偏最小二乘法设计了参数的计算方法;接着,本文选取扬州市西区附属医院停车设施为例进行实例验证;研究结果表明,随着空间尺度的增大,拥堵传递效应急剧下降,其中4阶以内的相邻单元可占总影响效应的90%以上;出入口区域是拥堵产生的先发位置,拥堵效应自出入口区域向上游和内车道逐次传播并逐渐衰减,且横向传播效应更快衰减,因而拥堵的影响区域主要分布于最外侧车道;随着路段流量和驶入率的提高,关键拥堵节点数均有不同程度的增加。本文构建的空间稳健自回归模型及提出的出入口区域拥堵演变分析方法和关键拥堵节点识别方法有助于指导停车设施管理与交通管控决策的制定。本文分析的重点着眼于停车设施出入口区域空间上的拥堵演变分析,然而拥堵的传播过程是一个时空过程,未来研究中还可以进一步探讨拥堵在时间上的演变规律。
基金项目
扬州大学大学生科技创新基金资助。