1. 引言
近年来,人们愈发关注振动的危害影响,进而促进减振技术方面的发展 [1]。振动主动控制因为减振效果较好、适应性强,受到广泛关注。
振动主动控制系统中一个关键问题就是选择合适的作动器。近年来,惯性作动器因为响应快、能够随意贴合在控制位置的表面,被广泛应用于振动和噪声主动控制中 [2] [3]。Tehrani等人驱动惯性作动器用于速度反馈控制回路,分析实验结果得出惯性作动器可用于振动控制 [4]。Camperi等人利用惯性作动器对平板振动控制,分析某一频段对平板动能衰减的影响,实验结果表明在惯性作动器作用下,利用惯性作动器控制自身周围振动情况可一定程度上降低平板的整体振动 [5]。Braghin等人以动力学角度分析和优化低频磁致伸缩惯性作动器有限元模型,将其用于低频主动控制,分析实验结果证明了其可行性 [6]。Mao提出了一种带有虚拟质量的惯性作动器 [7],在不改变作动器的物理参数下降低其固有频率,使其用于固支梁的加速度负反馈振动主动控制,分析实验结果得出随着虚拟质量的增加,控制系统的稳定性和控制性能显著提高。Engels表明分散式速度反馈控制效果比线性二次高斯调节器控制效果更佳 [8],启发了本文的实验思路。
机械与控制领域的探索促进了机械装备的发展,愈多创新装备在实验中被使用。本文目的是改造扬声器作为惯性作动器用于多通道分散式速度负反馈振动主动控制,进而控制矩形薄板的振动。
2. 基于扬声器惯性作动器模型
本文用于振动主动控制的惯性作动器是基于扬声器改造的 [9]。未改之前扬声器振动纸盆不能有效的接触平面,本人将亚克力板粘贴到纸盆表面,如图1所示,使改造后的惯性作动器能够传递有益控制力,其物理参数如表1所示。

Table 1. Physical parameters of inertial actuator
表1. 惯性作动器物理参数
把改进的惯性作动器看成质量弹簧阻尼系统进行分析 [10],如图2表示,其动力学方程如下:
(1)
其中:
、
、
分别是惯性作动器的移动质量、阻尼、刚度,
是力常数,I是输入电流。
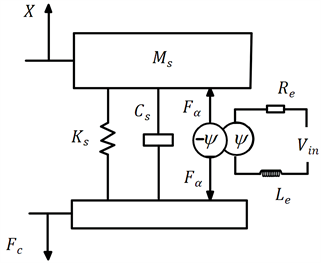
Figure 2. Mechanical model of inertial actuator
图2. 惯性作动器力学模型
从图2中可以发现,惯性作动器传递给控制对象的力
如下:
(2)
惯性作动器线圈的电磁感应表达式如下:
(3)
其中:
、
分别为惯性作动器的电感、电阻,
为输入到音圈的电压。
通过式(1)式(2)式(3)式子得出输入电压
到输出力
的传递函数如下:
(4)
其中:
通过Matlab绘出惯性作动器输入电压到加速度计传感器信号的频响函数图,如图3所示。在激励频率大于惯性作动器的固有频率时,惯性作动器能够输出稳定的控制力,并且相位保持不变,得出理论和实验结果相互吻合。
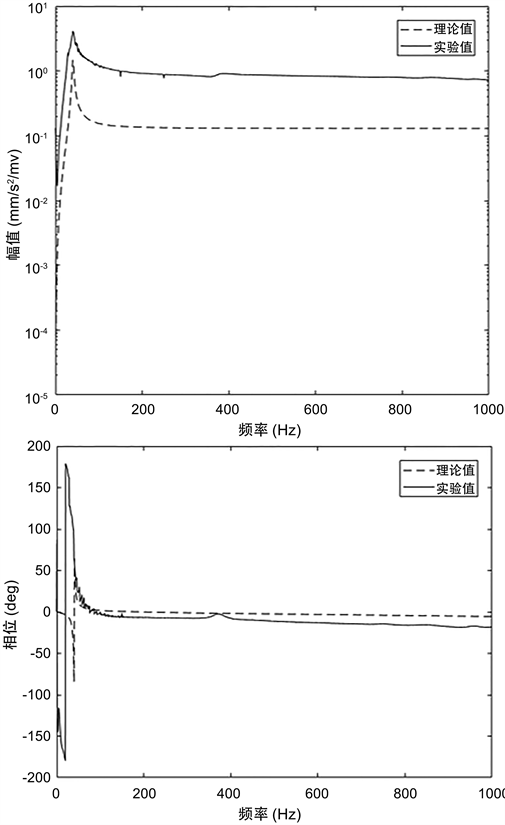
Figure 3. Frequency response diagram of inertial actuator
图3. 惯性作动器频率响应图
3. 基于惯性作动器的分散式振动主动控制
振动主动控制可分为前馈控制和反馈控制,反馈控制分为集中式控制与分散式控制,集中式控制仅通过一个控制器控制多个通道的传感器与作动器,若是一个通道中断时,可能导致整个系统不稳定 [11] [12]。分散式控制鲁棒性强、容易实施且控制通道之间互不干扰,每个控制通道由加速度计传感器和作动器组成,该作动器执行基本的反馈规律,不需要使用复杂的电子系统 [13] [14] [15] [16]。惯性作动器可用于对板的振动反馈控制 [9],本文进一步证明扬声器作为惯性作动器可用于多通道分散式速度负反馈振动主动控制的实验。矩形铝板的边界条件为四边固定,长、宽、厚度分别为0.44 m、0.34 m、0.002 m,所有实验照片如图4所示。
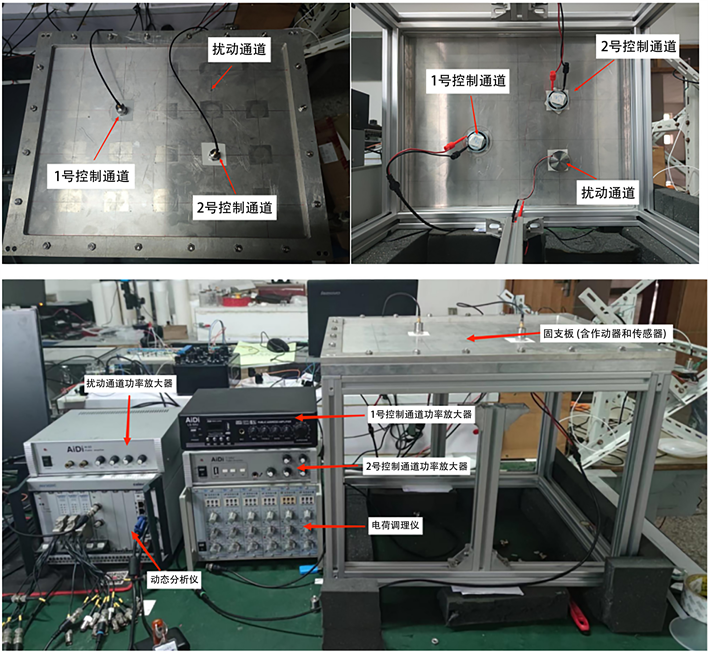
Figure 4. Experimental diagram of multichannel speed negative feedback control
图4. 多通道速度负反馈控制的实验图
进行多通道速度负反馈实验前,先分析1、2号控制通道的开环传递函数图,证明两个控制通道的可行性。1号、2号控制通道的频响函数响应如图5所示,因为两个控制点位均不在模态节点处,出现了多阶模态响应,即有利于控制力控制板的对应模态。图6是1号、2号控制通道开环传递函数的Nyquist图,板的响应都处在虚轴右侧,说明2个控制通道都稳定,可用于分散式控制。最靠近虚轴附近像似椭圆形的即是对应惯性作动器的幅相图,也正是这条曲线的限制,控制通道的反馈增益不能无限增大且有个最大值 [5],否则导致系统失稳。
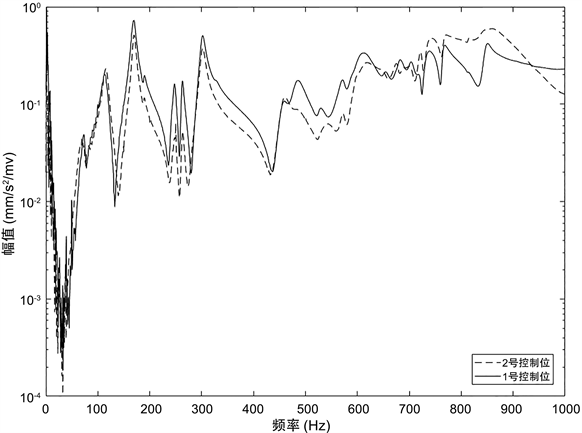
Figure 5. Open loop channel response of No. 1 and No. 2 control position
图5. 1、2号控制位开环通道响应
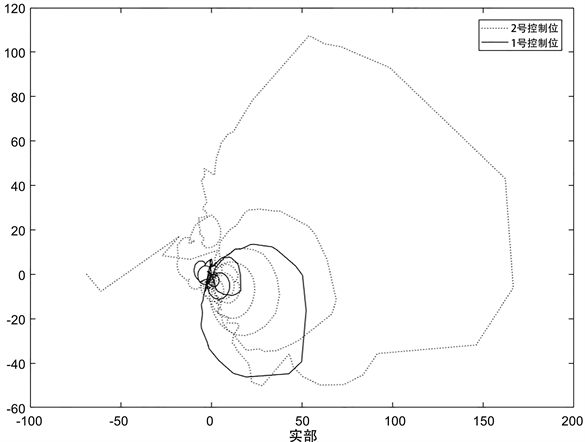
Figure 6. Nyquist diagram of No. 1 and No. 2 open loop channel
图6. 1、2号开环通道Nyquist图
在多通道分散式速度负反馈实验中,通过电荷调理仪将板加速度信号转成速度信号,并把速度信号传递到功率放大器与信号分析仪。调整功率放大器增益控制1号、2号通道作动器的力大小。1号、2号控制通道之间相互独立,惯性作动器只受速度信号与反馈增益的控制,进而输出有益控制力控制板的振动。实验示意图如图7所示。
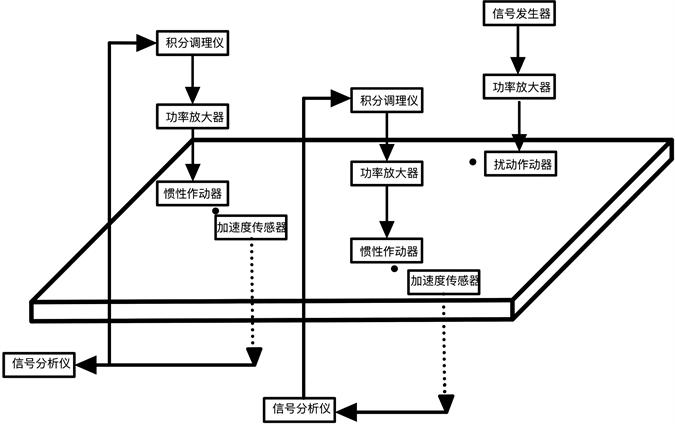
Figure 7. Schematic diagram of multichannel decentralized speed negative feedback
图7. 多通道分散式速度负反馈示意图
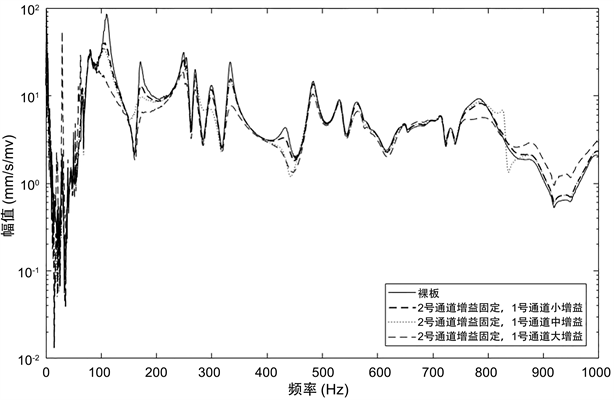
Figure 8. Channel 2 position speed response (mm/s)
图8. 2号通道位置速度响应(mm/s)
稳定性是反馈控制系统实现的一个关键因素,基于双通道控制系统的稳定性,采用了顺序闭环技术 [17],即保持一个控制通道的反馈增益不变,将另一个控制通道的反馈增益不断增加,直到系统稳定临界值。
本文将2号通道反馈增益设置成固定值、1号通道反馈增益为变量,结果如图8所示。通过图8可观察到1号通道增益调至最大值时,在110 Hz附近、180 Hz附近、290 Hz附近、450 Hz附近的控制效果都较好,相比于单通道控制而言,双通道整体控制效果都有明显提高。但是因为两个控制通道出现了耦合产生了新模态,在800 Hz附近出现了控制溢出。惯性作动器工作时,在40 Hz出现了控制溢出,原因是惯性作动器在其固有频率处相位突变产生反向控制力。
进一步通过激光分析板全局振动,提高实验精确性,实验装置如图9所示。首先,通过激光测振仪自带的电压信号激励扰动作动器。其次,利用1号、2号惯性作动器控制板振动。最后,将激光测振仪的摄像头垂直对准板的上表面,采集板的速度信号和模拟出板的响应。
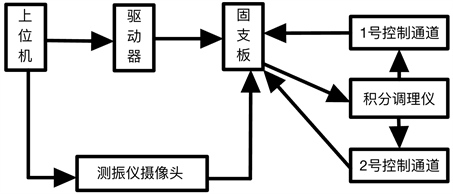
Figure 9. Experimental schematic diagram of laser vibrometer
图9. 激光测振仪实验原理图
图10是裸板在(1, 3)阶模态的最大幅值图,频率在245 Hz附近,由图可知未控制之前幅值最大时达到59.20。图11是板受双通道减振时在(1, 3)阶模态的最大幅值图,对该位置的裸板振幅减至33.47,振幅减少了43.4%。可知在加入两个控制通道的作用下,使得板的振动幅度大幅下降。
4. 总结
以扬声器作为惯性作动器,并对其力学模型进行分析。随后以分散式多通道速度负反馈方法对四边固支薄板进行主动控制实验,并以激光测振仪测量板的全局振动响应。实验结果表明,通过改造扬声器作为惯性作动器,可以有效降低薄板的振动,且多通道系统的控制效果更加显著,能够把薄板的(1, 3)阶固有频率的振幅降低43.4%。
基金项目
国家自然科学基金项目(51975266)。