1. 引言
随着我国社会经济水平的不断提高,我国汽车保有量及机动车驾驶人数量不断增加,致使我国现阶段交通压力过大,整体道路交通环境日趋复杂,交通事故导致的人员伤亡及财产损失等交通安全指标仍需进一步控制。为了构建便捷畅通,经济高效,绿色集约,智能先进,安全可靠的现代优质国家综合立体交通网和实现交通强国目标,首先必须解决的是交通安全问题,即如何降低道路交通风险,提高道路交通安全性。
道路交通风险评价是一个热门的研究领域,它旨在通过分析道路交通系统中各种因素对交通安全的影响,为交通管理和规划提供科学依据。国内外学者针对不同类型的道路和交通场景,采用了多种方法和模型进行了大量研究。王雪松等人 [1] 基于多条城郊主干道的数据,考虑了相邻路段之间的相关性,建立了分层负二项模型,并用该模型实现了对城郊道路安全水平的分析。杨沙 [2] 从区域灾害系统理论出发,构建了城市道路交通风险评价指标体系,并利用可拓物元模型对城市道路交通安全等级进行了划分。蔡晓禹等人 [3] 结合信息熵理论,构建了城市道路交通风险评估模型,并选取了急加速率、急减速率、急转弯率及超速率作为交通风险评价指标,并基于密度聚类算法和K-means算法获取得到风险评价结果。孙剑等人 [4] 基于快速路系统的检测器数据和交通事故数据,构建了贝叶斯网络分类器,实现了对快速路交通风险状态的分类,并证明其所提分类器具有较高的分类准确率。Samer等人 [5] 提出了一种基于空间多分辨率分析的方法,利用历史数据,将具有同质性的路段重新整合,实现了对道路危险路段的识别和交通事故的预测。Xu等人 [6] 基于交通流数据及交通事故数据,基于K-means算法将交通流划分为5种风险状态,并基于不同交通状态,建立条件逻辑回归模型,识别交通流状态与交通事故风险的关系。Park等人 [7] 利用基于GIS的地理加权回归模型评价道路交通安全状况,其结果既可识别危险路段,又可模拟事故碰撞结果。Yh A等人 [8] 提出一种实时交通安全评价方法,基于高分辨率轨迹数据,将事故与交通状态结合,挖掘其内在相关性。
综上所述,针对于道路交通风险评价方面已有大量研究,评价方法根据数据源可以分为基于历史静态数据和基于交通流运行动态数据的道路交通风险评价方法两种。其中基于历史静态数据的道路交通风险评价方法主要利用历史交通事故数据对道路交通风险进行评价,由于受到样本量限制,导致评价结果准确性较低。基于交通流运行动态数据的道路交通风险评价方法是利用交通流运行过程中交通流状态的变化进行风险评价,其评价结果更符合实际交通环境。本文针对现有研究存在的不足,提出了一种基于交通流运行数据的道路交通风险评价模型,该模型考虑交通流运行中的风险驾驶行为,并对其进行强度计算,进而依托风险驾驶行为强度,实现道路交通风险评价任务,为道路交通出行者提供即时交通风险信息并为交管部门风险主动防控提供理论支撑。
2. 风险驾驶行为
2.1. 风险驾驶行为定义及类型
风险驾驶行为是指驾驶人在车辆运行过程中针对当前环境出现错误的决断或注意力缺失等情况下,有意识或无意识产生的与正常驾驶行为有所偏离的驾驶行为,具体表现为在行驶过程中,突然改变车辆当前的行驶状态,且变化过程中加速度、角速度等属性变化程度超出正常范围,从而对交通流中其他车辆或行人带来安全威胁,最终会影响道路交通安全的驾驶行为。车辆在运行状态下,根据车辆驾驶行为特征,可将车辆行为划分为超车、变道、跟驰及减速等正常驾驶行为,风险驾驶行为则包括急加速、急减速、急并道等,具体类型如图1所示。
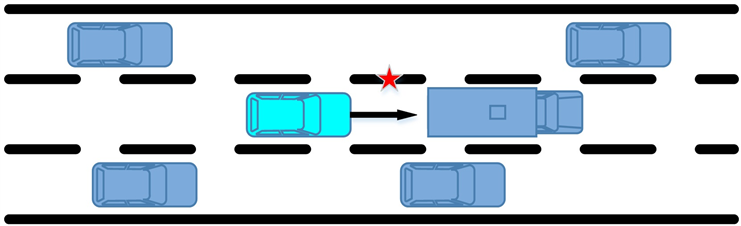 (1) 急加速
(1) 急加速 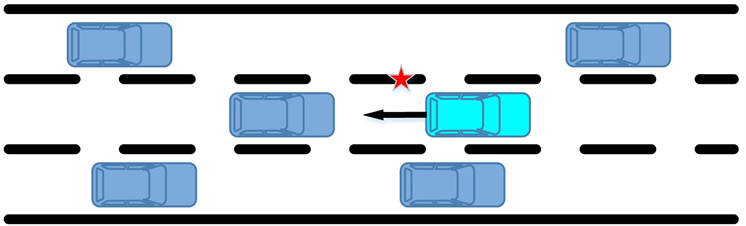 (2) 急减速
(2) 急减速 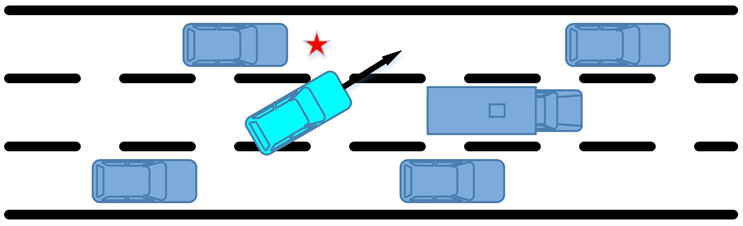 (3) 左急并道
(3) 左急并道 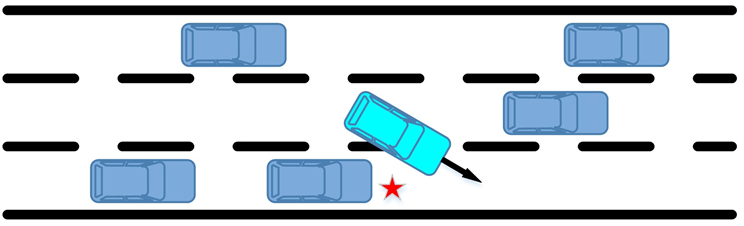 (4) 右急并道
(4) 右急并道
Figure 1. Types of risky driving behavior
图1. 风险驾驶行为类型
2.2. 风险驾驶行为识别
1) 风险驾驶行为数据采集
本文利用车载移动智能终端进行车辆驾驶行为数据提取,移动智能终端主要包含三大类传感器,分别为运动传感器、环境传感器、位置传感器。本研究主要利用运行传感器中的加速度传感器及陀螺仪传感器对车辆在道路上的行驶状态进行信息采集,首先建立如图2所示车体坐标系:
通过利用移动智能终端内置传感器进行车辆运行状态信息采集,得到如表1采集结果。采集得到的信息包括风险驾驶行为的时间信息、位置信息,包括行为发生坐标及所在路段信息、加速度信息及角速度信息。通过移动智能终端进行信息采集,并将获取得到的数据用于后续风险驾驶行为的识别,并对识别后的风险驾驶行为强度进行计算,从而为最终道路交通风险状态评价提供输入变量。

Table 1. Mobile intelligent terminal information collection table
表1. 移动智能终端信息采集表
2) 风险驾驶行为识别
本文选取风险驾驶行为中具有代表性的急加速(ACC)、急减速(DEC)、左急并道(LME)、右急并道(RME)四种典型风险驾驶行为进行研究。车辆在进行ACC与DEC两种风险驾驶行为时,车辆在Y轴方向的加速度会根据加速及减速的剧烈程度产生不同程度的变化,车辆在进行LME与RME两种风险驾驶行为时,车辆在X、Y两轴方向的加速度及Z轴方向的角速度会根据并道的剧烈程度产生不同程度的变化。
根据加速度传感器获取得到的传感器数据
,其中
分别为车辆在X、Y、Z三轴的加速度,以及陀螺仪传感器获取得到的传感器数据
,其中
分别为车辆在X、Y、Z三轴的角速度,并根据上述特征分析结果,将获取的数据单元变更为
,并通过数据滤波对原始数据单元进行降噪处理后得到最终的数据单元
。
通过上述分析,论文研究的四种风险驾驶行为的识别工作可分为以下两类:
1) ACC与DEC风险驾驶行为识别:
Adrian B等人 [9] 与Bagdadi等人 [10] 对车辆变速风险进行研究,研究发现,当车辆发生加速或减速行为时,如果加速度大于±3 m/s2时,道路交通风险会显著增加,因此将±3 m/s2作为判定车辆发生ACC和DEC行为的阈值。
(1)
(2)
其中:
、
分别为车辆异常驾驶与正常驾驶时的Y轴加速度,
为加速度阈值,
为事件持续时间。上述各个参数均需要针对不同路况选择相应值进行计算,在本研究中设定
为3 m/s2,
为1 s。
2) LME与RME风险驾驶行为识别:
相较于ACC与DEC两种风险驾驶行为,LME与RME行为在X轴方向上存在不同程度的加速度及Z轴方向上存在不同程度的角速度,其识别公式如下:
(3)
(4)
(5)
(6)
其中:
、
、
、
分别为车辆异常驾驶与正常驾驶时的X和Y轴加速度,
、
分别为车辆异常驾驶与正常驾驶时的Z轴角速度,
、
、
分别为加速度和角速度的阈值,
为最小换道区间。同理上述公式中的各参数需要根据实际路况确定,在本文中,设定
为2.7 m/s2,
为1.2 m/s2,
取值区间为[0.2,0.7],当
,认定其为转弯行为。
2.3. 风险驾驶行为强度计算
车辆在行驶过程中,由于自身因素或同一时空状态下交通流中其他因素影响导致风险驾驶行为的发生,各因素对于风险驾驶行为的影响最终会导致车辆自身运行属性的变化,如车辆的运行速度、加速度及角速度等,因此本文选取如下表2特征参数对风险驾驶行为的行为强度进行计算:
Table 2. Basic description table of model parameters
表2. 模型参数基础描述表
通过上表可以获得最终行为强度计算模型的特征集合,因此风险驾驶行为强度的计算公式如下所示:
(7)
其中:BI为风险驾驶行为强度,
为风险驾驶行为持续时间,
、
、
为评分权重系数,三者满足
,具体数值通过风险驾驶行为与交通事故的相关性确定,本文选取
,
,
为风险驾驶行为发生路段平均车速。
3. 考虑风险驾驶行为的道路交通风险评价模型
为实现道路交通风险评价目标,论文在获取得到风险驾驶行为强度后,对其时空分布特征进行分析,并提出了基于聚类算法的道路交通风险等级划分模型,并将风险驾驶行为强度与交通事故及违法行为数据融合,提出了道路交通风险评价模型,实现了对道路不同时空状态下的交通风险评价。
3.1. 风险驾驶行为强度分析
本文选取某国道40 km路段2019年1月至2021年4月的交通流运行数据作为研究对象,通过对风险驾驶行为强度进行计算,获取得到了研究道路的风险驾驶行为强度分布情况,如图3所示。从图中可以看出,在不同时空条件下,风险驾驶行为强度具有明显的波动性,因此本文考虑利用不同时空条件下路段风险驾驶行为强度对道路动态交通风险进行评价。

Figure 3. Temporal and spatial distribution of risk driving behavior intensity
图3. 风险驾驶行为强度时空分布图
本文将该路段等距划分为80个待评价路段,将识别获取得到的风险驾驶行为的时空信息及行为强度信息匹配至已划分完成的路段,并根据风险驾驶行为的密集程度,以天为单位,对发生在路段上的风险驾驶行为的差异性进行分析。通过分析同一路段不同时间和同一时间不同路段的风险驾驶行为分布差异,发现不同的时空条件下,道路风险驾驶行为强度概率分布存在差异,并且由于风险驾驶行为与交通事故间存在一定的相关性,即风险驾驶行为在表征路段道路交通风险方面具有一定的可行性。因此本文考虑,利用计算获取得到的风险驾驶行为强度信息及时空分布信息,基于聚类算法,对研究道路中不同路段的道路交通风险进行评价分析。
3.2. 基于K-Means++算法的道路交通风险等级划分
3.2.1. 风险驾驶行为强度概率分布曲线离散化
曲线的离散化就是将连续的数据进行离散化处理,通过对连续数据所在的范围区间进行分割并赋值,将连续的曲线数据转化为离散化的区间。其目的是为了能够把连续性的问题转化为计算机能够处理的离散性问题,经过离散化处理的特征,能够增强对异常数据的鲁棒性,并有利于模型的快速迭代。本文采取基于等距离的曲线离散化方法进行离散化处理。
3.2.2. 基于离散化处理数据的聚类分析
在完成概率分布曲线的离散化后,将所有已划分完毕的路段
的所有时间序列
的风险驾驶行为强度概率离散分布数据
进行聚类分析,其目的是将具有相似行为强度波动特性的数据进行聚类处理,从而完成不同交通风险的等级划分任务。本文采用无监督聚类中的K-means++算法进行聚类分析,具体步骤如下:
算法输入:样本集
,聚类簇数为K,最大迭代次数为N
算法输出:簇划分
1) 初始化质心选择
① 从数据点集合中随机选取一点作为聚类中心
;
② 对于数据集中每一点
,计算其与已选择的聚类中心中最近聚类中心的距离:
(8)
③ 重新选取聚类中心,选择原则为:较大的点,被选取为聚类中心的概率较大;
④ 重复步骤②和③直至选取出K个聚类中心并将其作为初始化质心进而运行K-means++算法。
2) 对于
① 初始化簇划分
,其中
;
② 计算样本
与各质心向量
间的距离:
,并将求得的最小
时的
标记为类别
,更新
;
③ 对于
,对
中所有样本点重新计算质心
;
④ 若所有质心向量无变化后,输出簇划分
。
将离散化处理后的强度概率分布
输入到K-means++算法中,通过
中各离散向量,将具有同质性的强度概率分布曲线划分为同一类别,进而获取得到基于风险驾驶行为强度的道路交通风险等级。
3.2.3. 聚类结果评价指标
根据道路交通风险等级判别聚类的特点,本文选取轮廓系数作为评价指标来评定道路交通风险聚类划分的效果好坏。轮廓系数是衡量节点与其所属聚类类别相较于其他类别的相似程度,其计算公式如下所示:
(9)
其中:
——r向量到所有它属于的类别中其他点的距离的平均值;
——r向量到所有非它属于的类别中的点的平均距离最小值。
轮廓系数的范围通常取[−1, 1],其值越趋近于1代表内聚度及分离度均相对较优,所有点的轮廓系数的平均值即为该聚类结果的轮廓系数。
3.2.4. 实验案例分析
经过风险驾驶行为识别处理后的风险驾驶行为数据,将不同路段不同时间的风险驾驶行为强度概率分布曲线离散化处理后,输入Kmeans++算法中,并通过评价指标轮廓系数确定聚类簇目,实验结果如表3所示,当
时,轮廓系数最大,聚类效果最好,因此将K-means++聚类簇目K设置为5。
Table 3. Table of contour coefficients for experimental results of K-means++ algorithm
表3. K-means++算法实验结果轮廓系数表
本文选取变异系数CV作为不同簇波动性分析指标,CV越大,表示风险驾驶行为强度概率分布波动程度越大,即车辆运行环境越复杂,道路动态交通风险等级越高。
(10)
通过对变异系数CV的计算,得到如下表4分析结果:
Table 4. Result analysis based on K-means++ clustering algorithm
表4. 基于K-means++聚类算法结果分析
为验证本文所提K-means++算法方法的有效性,将K-means算法与本文提出的K-means++算法的聚类实验效果进行对比分析,结果如表5所示。通过计算,本文提出的K-means++算法的
,高于传统K-means算法,证明聚类结果有效,簇划分结果良好。
Table 5. Analysis of clustering effects of different clustering algorithms
表5. 不同聚类算法聚类效果分析
最后,为验证本文针对交通流运行状态下道路交通风险评价结果的有效性,本文对不同风险等级状态下的路段历史交通事故数据进行统计分析,结果如表6所示,从表中可以看出,随着风险等级的增加,交通事故的占比随之增大,证明了本文所提评价方法能够有效评价道路交通风险。
Table 6. Proportion of traffic accidents under different road traffic risk levels
表6. 不同道路交通风险等级下交通事故占比
4. 结束语
论文基于车辆运行状态属性中的加速度及角速度变化程度,构建了风险驾驶行为强度计算模型,分析了不同时空状态下各待评价路段的风险驾驶行为强度分布差异,进而提出了基于K-means++算法的道路动态交通风险等级划分模型,并进行实例验证,分析模型能够对评价路段的道路动态交通风险等级进行有效划分,能够为其他道路的交通风险评价分析提供借鉴。