1. 引言
无人机倾斜摄影技术能够实现快速、便捷、自动化的无接触测量,在三维建模方面也得到广泛应用 [1] 。娄宁等人使用无人机快速、高效、完整的采集的高清影像数据,使用Smart 3D Capture处理数据,生成的实景三维模型 [2] 。阮競芸等人采用多视角深度图配准算法,统一标定相机的方位与现实的三维空间,结合相机和世界坐标,整合的所有点,构建三维模型 [3] 。但是上述两种方法在三维数据采集上都存在结构缺失、精度低、图像拉花和破洞等问题,导致后期的三维建模效果不理想。
近期利用三维激光扫描技术开展数据采集和三维建模逐渐成为新趋势,三维激光扫描技术采集的下层数据质量较好,但是精度更低 [4] [5] 。无人机航拍在高空数据采集方面性能十分优秀,这两种技术各有特点,优势互补,具有融合建模的基础。
建筑信息模型(Building Information Modeling, BIM)是国内外工程建筑领域的新发现,该技术在数字化保护方面具有很大的优势,它能够快速建立全方位的三维模型,作为数字化资料存档,提高研究与保护的信息化程度,以供后期的扩展性研究,在历史文化的传承和保护上具有重要意义。
因此,本文研究基于倾斜影像与点云数据的三维模型构建方法,以解决单一测量在精准度、完整性和视觉效果方面的问题。
2. 三维模型构建
2.1. 倾斜影像采集和预处理
本文通过无人机拍摄的倾斜影像,根据无人机高程信息和需要拍摄的目标等,设置无人机的航拍路线、时间和空域。使用五向飞行法,即中心投影的方式拍摄倾斜影像。采集后将中心投影的影像与正射投影的地图投影方式实施转换,以确保的数据准确性,其转换公式如下:
(1)
其中:测距观测值和焦距分别用E和D表示;
、
、
、
、
、
、
、
、
是外方位元素矩阵参数,
以及
分别用于描述建筑中某点的地面坐标以及点云数据的坐标。
采集多个角度的倾斜影像,任意一个角度的倾斜影像都具有大量的地理信息,包括前后角度、左右角度和正角度。预处理建筑倾斜影像数据可增强其三维建模质量,其中粗糙的倾斜影像会大大降低三维建模质量,拍摄建筑的方位以及角度的差异化,会导致倾斜影像出现重叠问题。
倾斜影像数据预处理主要分为两个方面:
1) 配置无人机的相关信息:包括各项参数和像素信息等,可以降低三维模型构建时的位移误差。
2) 通过Wallis滤波匀光匀色:调节高重叠度且色差不明显的影像,确保无人机采集的倾斜影像数据色调一致。
2.2. 点云数据采集和预处理
三维激光扫描仪由激光发射器、接收器、时间计数器以及软件等部分组成,是获取建筑点云数据的关键设备。三维激光扫描技术是测绘领域的革新技术,它改良了传统的单一化测量方式,其特点是不受光线和环境的影响,具有高效率、高精度的优势,可以获取高分辨率的三维数据。其公式如下:
(2)
其中:激光脉冲的方位角和俯仰角分别用
和
表示。
为了提高三维模型构建的效率,需要使用筛选算法处理采集到的点云数据,因为点云数据越多,三维模型构建的过程就越繁杂。其具体过程为:
1) 逐层聚类并排序点云数据,按照其分割点划分。
2) 根据构建三维模型的需要,设置合适的筛选长度。
3) 根据点云数据的筛选标准,去除不符合标准的点云数据,留下符合标准的点云数据。
4) 如果点云数据在层内,直接返回第一步;如果点云数据不在层内,则转至下一步。
5) 筛选点云数据,判断点云数据是否处于数据立方体中,是则调整分割点继续筛选,否则不再筛选,并输出最终结果。
因为原始的点云数据含有很多噪声干扰,例如其它房屋、树木、电线、鸟类、动物等,所以还需要降噪处理筛选后的点云数据,通过滤波的方式去除内外的噪声点,只保留的主体部分。
2.3. 倾斜影像数据与点云数据融合
由于周围的环境比较复杂,无人机在采集倾斜影像时获得的建筑侧面影像不完全,会出现破洞和拉花的情况。而三维激光扫描仪无法采集檐口以上部位的数据,所以为了得到满足建模要求的三维模型数据,需要融合倾斜影像数据与激光点云数据。采用新特征点配准算法融合处理上述数据,该算法优化了原有配准算法,将原算法自主选取同名特征点的过程进一步优化,优化时采用的算法是Kd-Tree邻近点搜索算法,该算法通过计算特征点的邻近点拟合平面的法向量,最终获取有价值的同名特征点,实现平移以及旋转两种变换矩阵的运算。新特征点配准算法主要流程如图1所示。
新特征点配准算法具体步骤为:
1) 自主选取同名特征点,运算平移矩阵T1和旋转矩阵R1,并将的倾斜影像数据与激光点云数据粗拼接。
2) 通过Kd-Tree邻近点搜索算法处理粗拼接数据,以点
为中心选取距离最短的M个数据点云坐标,据此建立T点的最小二乘面,并计算其法向量
。
3) 同样使用Kd-Tree邻近点搜索算法,以点
为中心,从倾斜影像数据与激光点云数据中各自选取M/2个距离
最短的数据点,据此建立T点的最小二乘面,并计算其法向量
。
4) 运算法向量
、
与天顶方向的夹角
、
,并求出二者的差值。为了增强配准精度,需要将倾斜影像数据与点云数据精确拼接,如果差值低于阈值,则计算M个点的坐标均值,获取平移矩阵T和旋转矩阵R;如果差值高于阈值,则将同名特征点过滤掉,再次计算变换矩阵,循环上述过程,直至全部同名特征点都满足条件为止。
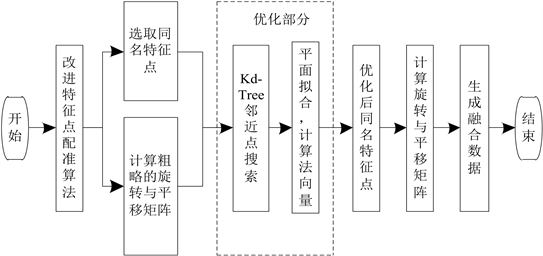
Figure 1. Flow chart of new feature point registration algorithm
图1. 新特征点配准算法流程图
特征点配准算法:设置激光点云数据原始坐标和倾斜影像数据坐标分别为A和B,再结合公式(3),获取平移矩阵T和旋转矩阵R。
(3)
(4)
(5)
其中:同名点位在激光点云模型A和倾斜影像模型B的坐标分别用PA和PB表示;两个模型之间的旋转转换矩阵用R表示;通过最小二乘法计算两个模型中三组同名特征点的三维空间值,可以获取两种数据配准的6个坐标转换参数
,即平移矩阵T和旋转矩阵R的数值,其转换矩阵为
。
倾斜影像模型B向激光点云模型A的数据配准时,需要基于转换矩阵数值,向两站点间转换公式(6)内融入B中各点坐标
,获得B中数据在A中的坐标值
。
(6)
2.4. BIM三维建模
2.4.1. 提取轮廓线
轮廓线的获取需要调控建筑差异视图以及剖切深度,在此基础上,填充建筑主体结构(墙柱、房梁、楼梯等)以及外墙材料,分别采用灰色填充方法以及调节裁剪框大小的方法,而后种方法调节过程中需要参照图形比例尺。根据空间几何原理,按照倾斜影像数据与点云数据融合后的影像,提取特征点和特征线,开展曲线拟合,即可得到的轮廓线。
2.4.2. BIM三维建模
的BIM三维建模采用的软件是Revit,代入倾斜影像和激光点云的融合数据,依据轮廓线和特征点得出建筑各构件的尺寸数据,并建立相应的构件模型,将每个部分的构件组装在一起,获取BIM三维模型。主要包括台基、屋顶和屋身,其中屋顶包括屋脊、面瓦、瑞兽等,屋身包括墙体、梁柱、门窗等,每个构件都不相同,还有内外部装饰,如壁画、雕刻等。使用Revit软件的模型交错和镜像等功能,通过Sketch Up将构件组成整体的模型。在总体模型整合中,需要确定不同构件在实际平面影像中的结构方位,同时注意统一不同构件点云数据的精度以及坐标系。
2.4.3. 纹理贴图
通过Photoshop软件处理纹理图片后,导入Revit软件实施BIM三维模型贴图,可以增强模型的真实度。将调节好的纹理图片导入Revit软件中,在建筑不同部分曲面纹理贴图,分别生成平面、立面、剖面三种图像,选择正视图和平行投影,合成最终的BIM三维模型效果图。综上所述,本文采用无人机和三维激光扫描仪采集的倾斜影像数据和激光点云数据,并对预处理相关数据,通过新特征点配准算法融合数据,得出准确完整的三维数据,最后使用Revit软件构建BIM三维模型。其具体流程用图2表示。
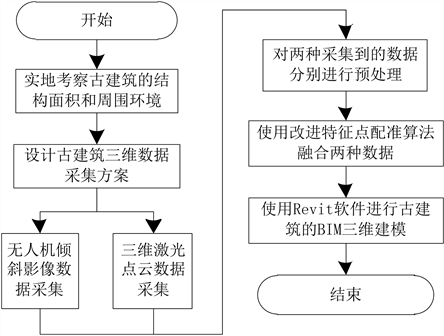
Figure 2. Overall flow chart of 3D model construction
图2. 三维模型构建总体流程图
3. 实验及分析
3.1. 实验环境与数据采集
实验选取某寺庙作为三维建模的对象,其建筑总面积为870 m2,整体布局坐北朝南,一共分为四个部分:前殿、翼廊、中殿、后殿。本文选用大疆Mavic 3T无人机采集寺庙的倾斜影像,相机有效像素4800万,飞行速度15米/秒,飞行高度6000米续航32公里。根据寺庙的面积确定无人机的倾斜影像拍摄范围为0.46 km2,实际航摄建模区域为560 m2,共采集587个有效影像,用时3.75 h。选用拓普康GLS-2000型三维激光扫描仪采集寺庙的三维数据,在实地勘察寺庙的布局和结构后,共设置22个采集站点,其中内部12个,外部10个,尽量确保点云数据采集的完整性与准确性。因为内部结构和纹理都比较繁杂,所以两个扫描点之间的距离小于4.5 m,重叠率不低于55%,外部的扫描重叠率不低于35%即可,使用标准扫描,范围在360˚ × 320˚,大概用时为45 min,每个站点的点云数量约为3 × 107个。
3.2. 数据预处理效果实验
1) 倾斜影像匀光匀色
实验选择寺庙的中殿作为测量目标,将无人机采集的各个角度和方位的倾斜影像数据通过Wallis滤波匀光匀色处理,其处理前和处理后的效果如图3所示。从图3可以看出,倾斜影像数据在经过统一的匀光匀色处理后呈现出更加清晰的效果,消除了光照、天气、环境等对图像的影响,保持统一的色调和辨析度,有利于提高后期三维建模的质量。
 (a)
(a)  (b)
(b)
Figure 3. Comparison of tilted image before and after uniform light and color. (a) Before uniform light and color; (b) After uniform light and color
图3. 倾斜影像匀光匀色前后对比图。(a) 匀光匀色前;(b) 匀光匀色后
2) 点云数据去噪
降噪处理三维激光扫描仪采集的中殿点云数据,消除其它的干扰因素,只保留建筑的主体部分,其处理前和处理后的效果如图4所示。从图4可以看出,原始的三维点云数据存在较多的噪声点,建筑的轮廓也很模糊,通过降噪处理后去除了多余的杂物和噪声点,建筑影像更加清晰,结构明显、对后期三维建模十分有利。
3.3. 数据融合效果实验
实验选择寺庙前殿的正门部分作为数据采集的对象,使用新特征点配准算法融合预处理后的倾斜影像数据与激光点云数据,获得高精度、完整的前殿正门三维建模数据,与融合前的倾斜影像数据和激光点云数据在数据采集效果方面展开对比实验,其结果如图5所示。从图5中可以看出,寺庙前殿正门的激光点云数据虽然比较精确,但是屋顶部分有很明显的缺失;倾斜影像数据更加完整,也更加趋于真实,但是图像中间出现了明显的拉花和破洞现象;而二者的融合数据则呈现了完整、准确的前殿正门三维数据。说明本文方法可以获取完整、高精度的三维数据,解决了单一技术测量的不足,大幅度提高了后期三维建模的质量。
 (a)
(a) 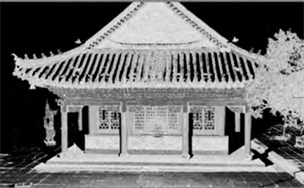 (b)
(b)
Figure 4. Comparison of point cloud data before and after denoising. (a) Before denoising; (b) After denoising
图4. 点云数据去噪前后对比图。(a) 去噪前;(b) 去噪后
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 5. Comparison of effects before and after data fusion. (a) Point cloud data; (b) Oblique image data; (c) Fusion data
图5. 数据融合前后效果对比图。(a) 点云数据;(b) 倾斜影像数据;(c) 融合数据
3.4. 纹理贴图效果对比
实验选择寺庙后殿测量并构建BIM三维模型,通过无人机采集的高清图像,获取后殿各个构件的纹理信息,在实体三维模型上纹理贴图,其结果如图6所示。从图6中可以看出,三维模型在经过纹理贴图后更加的真实、清晰,很好地还原了真实面貌,各个构件的细节纹理和图案辨识度都很高,大幅度提升了BIM三维模型的质量,对于后期的数字化存档和研究都具有非常重要的意义。
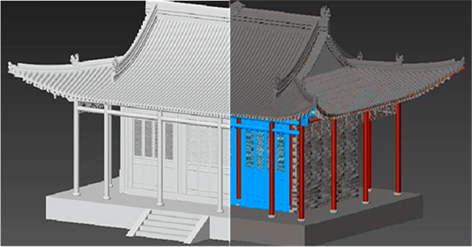
Figure 6. Comparison of the effects of 3D model texture mapping before and after. (Left) Before texture map; (Right) After texture map
图6. 三维模型纹理贴图前后效果对比图。(左) 纹理贴图前;(右) 纹理贴图后
3.5. BIM三维建模数据统计与分析
为了验证本文方法在现实当中的三维建模性能,通过对寺庙整体结构的三维模型构建,统计其结果的精准度、完整度以及建模时间,将寺庙的整体结构分为4个子部分:前殿、翼廊、中殿、后殿,分别开展三维建模,其中每个子部分由台基、屋身和屋顶三个部分组成,合计12组数据,将得出的各种数据指标的对比分析结果通过表1呈现。从表1当中可以看出,无论是哪一种建筑结构,本文方法所建立的BIM三维模型的精准度都是很高的,最低为87.59%,最高可达96.78%,从模型构建的完整度上来看整体的数据也是比较理想的,总波动范围在85.12%~95.78%以内,同时各个部位三维建模所用的时间也都很短,基本保持在3小时以下,说明使用本文方法构建的BIM三维模型不仅质量高、速度快,而且位置精准,具有优秀的建模性能。

Table 1. Statistical table of 3D modeling data for temple BIM
表1. 寺庙BIM三维建模数据统计表
4. 结论
本文采用无人机和三维激光扫描仪采集的倾斜影像和激光点云数据,并对其预处理,通过新特征点配准算法融合两种数据,得出准确完整的三维数据,实现精准的BIM三维建模。通过实测数据验证了文中方法可以获取完整的、高精度的三维数据,解决了单一技术测量产生的结构缺失与图像拉花、破洞等问题,大幅度提高了三维建模的质量和速度。