1. 引言
串联机器人能够适应工作空间大以及灵活性要求较高的工作场合,但关节之间累积误差大,精度较低。而并联机器人能够实现高速高精度的运动,但是工作空间比较小、各关节之间有较强的耦合性。混联机器人结合了两者的结构特点,简化了机械结构,载荷分布均匀,机构的结构刚度好、定位精度高,适用于高速运动的场合 [1] ,拓宽了机器人机构的应用范围,同时冗余驱动改善了机器人机构的灵巧性并克服机器人机构的瞬时奇异性,在工业和医学领域得到了广泛的应用。
机器人各机构尺寸的取值与机构的性能指标如灵巧度、承载能力以及速度等关系紧密,为了对机构进行合理的设计和优化,需要深入研究两者之间的对应关系。Vincent [2] 使杆件总长与工作空间直径的比达到最小值,约束其Jacobi矩阵奇异值和执行器速度,既保证了较大的工作空间,又具有较大的速度。刘欣 [3] 以一种平面冗余并联机器人为优化对象,对其尺寸参数进行优化,定义了运动精度、力传递性能和刚度性能指标,优化后的机构末端执行器不仅具有较大的工作空间,而且具有较好的运动学和动力学性能。张春凤 [4] 以3RRR并联机器人为研究对象,采用粒子群算法对其尺寸参数进行分析并取得最优值。在机器人尺寸优化研究领域,研究者多以研究并联机器人尺寸性能关系为主,对冗余混联机器人研究相对较少。
本文以一种三自由度冗余驱动混联机器人为研究对象,针对该机器人的结构特点,对该机器人的尺寸参数进行优化设计,利用MATLAB算法绘出该机器人在工作空间内的各项性能图谱;分析该机器人的尺寸参数与其性能的关系,并通过对各项性能图谱与机器人建模仿真结果的讨论,验证了该尺寸优化方法对混联冗余机器人的适用性。
2. 三自由度冗余混联机器人简介
该三自由度冗余驱动混联机器人以固高科技的平面二自由度冗余驱动并联机器人为基础,在其末端执行器处增加了一个Z轴串联机构。该机器人具有三个方向的自由度,即机构的末端执行器在X、Y、Z方向的自由度,但它包含四个驱动器,故其属于冗余驱动混联机器人系列,该机器人的工作平台如图1所示。
Z向的上下移动由独立伺服电机控制,移动方式为丝杠螺母副,移动距离由上下两个传感器控制,传感器的位置可调,使得该机器人能够根据加工工件的厚度来调整Z向的移动距离。X与Y两个方向自由度由并联部分控制,串联部分实现Z方向的移动的自由度,串联部分与并联部分共同工作,即体现了并联部分的优势,又增加了机器人的整体工作的空间,从而使其可以实现空间三自由度运动。
3. 机器人工作空间分析
由于Z轴串联机构与平面并联机构之间没有耦合关系,分别由不同的电机单独控制,故在进行运动学分析时可以分开进行研究。对于串联机构,其Z轴移动距离由传感器的位置来控制,传感器的位置可控,进而改变混联机器人在Z轴方向上工作空间的大小。对于并联机构,其结构示意图如图2所示。
该并联机构结构对称,每条运动支链可以看做一个二杆机构,各杆件之间为转动副联接。C点为末端执行器的位置。设主动杆 杆长为
杆长为 ,从动杆
,从动杆 的杆长为
的杆长为 ,正三角形的中心点到其各个角点的距离
,正三角形的中心点到其各个角点的距离 为
为 。
。
为更系统的研究该机器人的结构,需将机器人并联部分的各个杆件实际尺寸值无量纲化 [5] ,即令:

Figure 1. The working platform of the 3-DOF redundant actuation hybrid robot
图1. 三自由度冗余混联机器人工作平台

Figure 2. Structure sketch of parallel structure of the 3-DOF redundant actuation hybrid robot
图2. 混联机器人并联机构部分的结构示意图
 (1)
(1)
 (2)
(2)
其中, 表示各个杆件的实际尺寸,
表示各个杆件的实际尺寸, 为无量纲参数,表示各个杆件的相对长度。
为无量纲参数,表示各个杆件的相对长度。
由式(1)和式(2)得:
 (3)
(3)
机器人若能够正常的运行,各杆件尺寸的数值应达到以下标准:
 (4)
(4)
为了便于设计空间的可读与可用,无量纲杆长 、
、 与
与 中任意两个参数互相独立,把其放到平面的二维空间中,得到其并联机构的设计空间,如图3所示。
中任意两个参数互相独立,把其放到平面的二维空间中,得到其并联机构的设计空间,如图3所示。
四边形ABCD中的任意一点(如点a)与都三维坐标 一一对应,同时与并联机构的尺寸参数也唯一对应,因此所有由
一一对应,同时与并联机构的尺寸参数也唯一对应,因此所有由 、
、 与
与 定义的无量纲并联机构均位于四边形内。这样就可以在所得到的设计空间中分析机构的尺寸值与性能指标间的关系。
定义的无量纲并联机构均位于四边形内。这样就可以在所得到的设计空间中分析机构的尺寸值与性能指标间的关系。
4. 机器人尺寸参数的优化
4.1. 尺寸参数的选择
机器人的性能指标主要有:工作空间的形状和大小、灵巧度、刚度、承载能力等 [6] 。这些指标与机构各杆件的尺寸参数以及位置和形态息息相关,通过研究它们之间的相互关系,对机器人拓扑结构设计以及参数优化都有重要的参考意义。
文献 [7] 详细介绍了对于并联机构各性能指标的定义,通过其算法用MATLAB绘出对应的性能图谱,分析图谱得出以下结论:在二自由度并联机构设计空间中所对应的 和
和 的范围内,灵巧度指标值较大(
的范围内,灵巧度指标值较大( ),机构的全条件指标值较好;机构承载能力的极大值指标和极小值指标均较大(
),机构的全条件指标值较好;机构承载能力的极大值指标和极小值指标均较大( ,
, ),可承受较高的工作载荷;机构刚度极大值指标和极小值指标均不高(
),可承受较高的工作载荷;机构刚度极大值指标和极小值指标均不高( ,
, ),机构刚度较大不容易变形。
),机构刚度较大不容易变形。
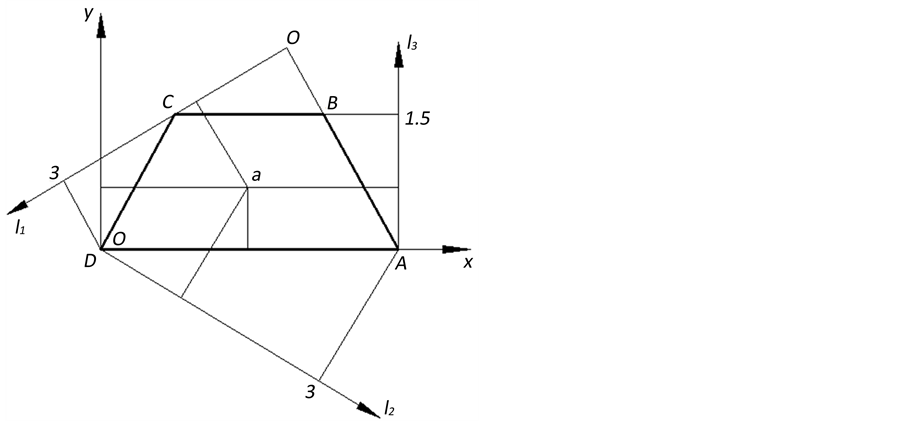
Figure 3. The design space of parallel structure of the 3-DOF redundant actuation hybrid robot
图3. 混联机器人并联机构部分的设计空间
考虑到机构末端执行器工作空间的连贯性及实用性,兼顾考虑机构性能各项同性较好的原则 [7] ,本文选择并联机构的尺寸参数范围为 、
、 和
和 。在此范围内,机构末端执行器的工作空间具有连贯性,没有内部边界奇异点 [8] ,理论工作空间面积较大,灵巧度指标较高,承载能力与刚度较好,其他指标也适中。综上,优化参数,在此范围内选取合适的无量纲尺寸参数,参数值见表1。
。在此范围内,机构末端执行器的工作空间具有连贯性,没有内部边界奇异点 [8] ,理论工作空间面积较大,灵巧度指标较高,承载能力与刚度较好,其他指标也适中。综上,优化参数,在此范围内选取合适的无量纲尺寸参数,参数值见表1。
4.2. 性能图谱的分析
当机构尺寸满足 时,该机器人的理论工作空间为三条支链工作空间相交的区域,由于Z轴为串联,在Z向的任一高度,X-Y平面上的工作空间是一致的,因此,只需分析X-Y平面工作空间内的运动性能。设定机器人Z轴的移动距离为100 mm,运用MATLAB软件,绘制出三自由度混联机器人的三维工作空间点状云图,如图4(a)。并在此工作空间中利用MATLAB算法对其各项性能进行分析,从而绘出在此工作空间中的各项性能图谱,如图4(b)~图4(f)。
时,该机器人的理论工作空间为三条支链工作空间相交的区域,由于Z轴为串联,在Z向的任一高度,X-Y平面上的工作空间是一致的,因此,只需分析X-Y平面工作空间内的运动性能。设定机器人Z轴的移动距离为100 mm,运用MATLAB软件,绘制出三自由度混联机器人的三维工作空间点状云图,如图4(a)。并在此工作空间中利用MATLAB算法对其各项性能进行分析,从而绘出在此工作空间中的各项性能图谱,如图4(b)~图4(f)。
由其性能图谱得知:
(1) 各指标在其工作空间中的变化趋势均比较平稳,因此优化后的尺寸参数具有合理性。
(2) 在接近工作空间中心的位置,灵巧度指标较大( ),越靠近工作空间边界,灵巧度逐渐降低。
),越靠近工作空间边界,灵巧度逐渐降低。
(3) 承载指标与刚度指标匀满足要求,但越靠近工作空间边界,承载力极小值 逐级递减,刚度极大值
逐级递减,刚度极大值 逐级递增,承载能力与刚度逐渐降低。
逐级递增,承载能力与刚度逐渐降低。
由此得出结论:在此工作空间中,在接近中心点的位置,各项性能指标均比较好,越靠近工作空间边界,各性能越不稳定。
若选取量纲化因子 ,选取表1所得的参数值,则机构的实际尺寸参数为
,选取表1所得的参数值,则机构的实际尺寸参数为 ,
, ,
, ,末端执行器的实际工作空间面积为
,末端执行器的实际工作空间面积为 ,对应的各个电机坐标位置为A1 (0,312),A2 (540,0),A3 (540,624)。
,对应的各个电机坐标位置为A1 (0,312),A2 (540,0),A3 (540,624)。
5. 模型的建立与仿真
5.1. 仿真模型的建立
本文在Solidworks软件建立机构的三维空间模型,在保证混联机器人仿真运动完整性的前提下三维模型应尽可能的简化。在进行装配时,各个构件所在的位置即为ADAMS中仿真运动的初始位置,因此,在装配时需要将末端执行器的位置固定下来,避免后续在ADAMS中进行调整比较麻烦。
将建好的三维模型导进到ADAMS中,并ADAMS中对机构各部件的属性、约束等重新设定 [9] 。在需要设置约束的位置以及参考点位置添加marker点,接着根据各杆件之间的运动系,在基座与地面之间添加固定副,在三个主动杆与基座或从动杆中间增添转动副约束,在三个从动杆之间添加三个转动副,在串联Z轴上添加移动副。在A1、A2、A3处添加旋转驱动,在串联Z轴处添加移动驱动。
因为该机构为冗余机构,所以在所建模型自检过程中会产生冗余的约束,从而导致仿真结果可能出现较大的偏差,因此需要将ADAMS中的冗余约束去除,通常采用的解决办法是将模型中的低副或者高

Table 1. The dimensionless parameters and performance index of mechanism
表1. 机构的无量纲尺寸参数及部分性能指标值
副用基本副或者是基本副的组合来代替 [10] 。在本模型中,将B1处的转动副更改为点点副,将B2处的转动副更改为点点副和平行副的组合,将B3处的转动副更改为点点副,将C处其中两个转动副分别更改为点面副、点线副,这样就可以消除机构的冗余约束 [11] 。并对模型进行自检得该仿真无冗余约束,其三维仿真模型如图5所示。
5.2. 仿真结果的分析
合理安排末端执行器的运动轨迹,使其始终保持在理论工作空间的范围内,并尽量接近工作空间的
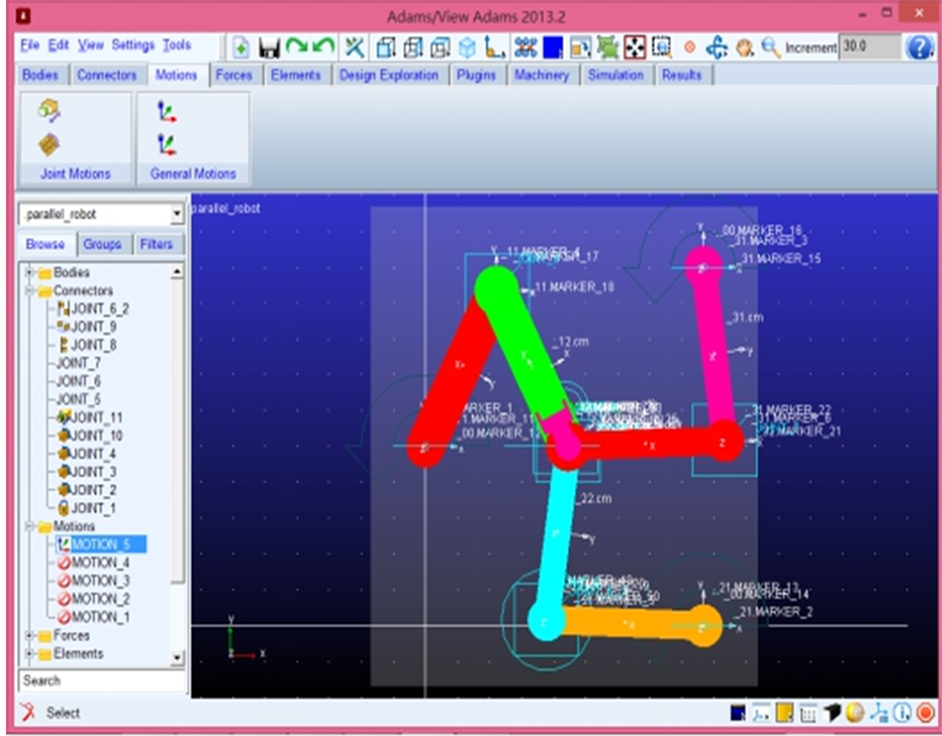
Figure 5. The model of simulation in ADAMS
图5. ADAMS仿真模型
边缘,以便更好地分析混联机器人在理论工作空间中的工作特性。给定机器人的运动轨迹曲线:
 (5)
(5)
机器人末端执行器的轨迹为一个半径随时间逐渐增加的空间螺旋线,其圆心为 (270,312)。为了便于仿真分析,首先将之前添加的三个旋转驱动以及一个移动驱动设置为无效,然后在末端执行器处添加一个具有三个方向移动自由度的点驱动,根据运动轨迹方程设置点驱动的驱动方程,设置运动学仿真参数为160 s,500步,在ADAMS中的仿真后处理模块可以求出相应的仿真曲线,如图6~图7所示。
由各主动关节的受力曲线和力矩曲线可知:
在末端执行器运动的前半部分,各主动关节受力平稳,其曲线波动幅度较小,而当末端执行器逐渐接近工作空间的边缘部分时,受力变化曲线与力矩变化曲线均存在很明显的波峰,波动较大。由此可知,在混联机器人的设计空间的中心部分,机构的受力较小,且不容易变形,容易实现高速高精度的加工,靠近边缘部分,机构的承载能力和刚度性能都会有所下降,从而导致这与理论工作空间范围内对机器人性能图谱的分析一致,验证了对性能参数分析的正确性。

Figure 6. The force curve of each active joint in robot
图6. 机器人各主动关节受力变化曲线

Figure 7. The torque curve of each active joint in robot
图7. 机器人各主动关节力矩变化曲线
6. 结论
针对目前对少自由度混联机器人尺寸优化的研究较少的情况,本文对一种三自由度冗余驱动混联机器人进行结构分析,根据机器人不同结构的特点选取合理的尺寸优化参数,在MATLAB中绘出混联机器人优化后机构的各性能指标图谱,分析各指标在其理论工作空间中的分布规律和变化趋势。对该机器人进行建模与仿真,其结果与机构理论工作空间中性能图谱的分布规律相一致,即在该机器人工作空间中心位置各项性能较好,靠近边界各项性能逐渐降低。其尺寸优化的方法为相关混联机器人机构的性能分析和优化提供依据。
致谢
在此由衷的感谢我的导师惠记庄教授,在论文撰写过程中多次询问研究过程,并耐心的为我指点迷津,帮助我开拓研究思路,精心点拨、热忱鼓励;感谢实验室的师兄师姐在论文研究的过程中给予的帮助与支持;感谢我的伙伴们程顺鹏、赵斌等人在论文写作过程中提供的热心帮助!
基金项目
基于层级堆聚理论的并联机器人动力学建模与约束跟随控制方法研究 (51605038)。