1. 引言
颅底凹陷寰枢椎脱位(BI-AAD)是一种复杂的颅颈交界区畸形,患者主要表现出寰枕融合、枕髁与寰椎外侧骨融合、外侧寰枢关节高度丢失、枕颈间不稳等特征 [1]。BI-AAD复位融合技术已成为主要的治疗手段,其中后路侧方关节松解结合悬臂复位内固定技术取得良好的临床手术效果 [2],通过使用关节间融合器(cage)结合C2椎弓根螺钉(C2 Pedicle Screw, C2PS)和后路枕骨板(Occipital Plate, OP)共同进行固定,来恢复患者正常寰枢椎间的高度和角度。目前临床手术中使用的静态融合器结构的高度和角度是固定的,对于不同患者的颅颈交界区不同畸形程度实施手术时存在一定的困难,设计和研发可调节高度和角度的寰枢椎关节间融合器对临床手术方案的实施和治疗效果的提高具有重要的意义。
可调节高度和角度关节间融合器的临床应用目前以腰椎为主,而颈椎由于寰枢关节结构和形态的特殊性,可调节寰枢关节间融合器的设计研发及其对颅底凹陷寰枢椎脱位生物力学性能影响的研究报道相对较少。张童童等 [3] 针对颈椎融合器高度和形状与椎间不匹配问题,设计了一款高度可调节、形状贴合上下终板的颈椎椎间融合器,利用有限元方法对C4-C5节段活动度及终板应力进行分析评估,并3D打印后进行体外压缩实验,结果表明颈椎椎间融合器具有一定的安全性与稳定性。张泓 [4] 等设计新型侧前方入路一体式可撑开可复位椎间融合器(OLIF + IERC),利用健康的L3-S1有限元模型分析3种OLIF手术的生物力学指标差异,结果表明所设计融合器生物力学稳定性、抵抗融合器沉降及椎间盘高度降低的能力优于无螺钉固定,在轴向旋转工况下优于双侧椎弓根钉棒固定。Lin [5] 等纳入检索数据库中的10项关于可膨胀椎间融合器与静态椎间融合器在经椎间孔融合术(TLIF)的研究(共1440名患者)进行荟萃分析,结果发现可膨胀椎间融合器可改善TLIF患者的功能,恢复椎间及椎间孔高度。Chang [6] 等结合10年间的经椎间孔椎间融合术临床资料,对于可伸缩和静态TLIF椎间融合器的长期植入的影像学结果进行回顾性分析,表明可膨胀式TLIF椎间融合器较静态椎间融合器能更好地恢复椎间高度,但下沉率也较高。Gabriel等 [7] 采用体外生物力学实验方法分析比较了OP分别联合C2PS和C2椎板螺钉枕颈内固定的力学特性,结果表明两种固定方式提供的稳定性相似。Ma等 [8] 采用有限元方法利用健康男性的C0-C3模型研究了C2椎板内螺钉在上颈椎固定中的生物力学效应,结果表明椎板螺钉内外壁的应力与C2PS固定相似。Bo等 [1] 对寰枕融合合并C2-C3融合的C0-C3节段有限元模型进行寰枢椎后路手术动态模拟验证,为简化BI-AAD手术提供了生物力学理论基础。Liu等 [9] 通过有限元分析方法,评估了寰椎侧块螺钉(C1LMS)在寰枕融合固定中的生物力学作用,发现C1LMS增强了C2稳定性,降低了枕骨螺钉和钛棒上端的应力。Wang等 [10] 将健康枕寰关节有限元模型绑定模拟寰枕融合,通过计算模型寰枢关节间活动度、横韧带应力及枢椎关节面等效应力对BI-AAD的发病机制进行了探讨与解释。Bo等 [11] 利用先天性BI-AAD患者的三维有限元模型模拟验证了不同类型BI-AAD患者采用一种新的压缩和牵引复位(CRD)技术的可行性和有效性。
Goel等 [12] 首次提出在BI-AAD患者寰枢关节间放入融合器或间隔物,取得了一定疗效;Yoshizumi等 [13] 用填充骨片的圆柱形钛笼对寰枢关节进行充分融合缓解BI;Patkar等 [14] 发现楔形钛笼使寰枢关节形成了较为坚固的植骨融合;Lee等 [15] 使用带有自体骨片的颈椎融合器治疗寰枢椎不稳和与类风湿关节炎相关的BI。但在关节间融合器植入后仍然有高度和角度不匹配而导致的远期融合器塌陷的风险。
基于BI-AAD患者医学影像数据分析寰枢椎侧方关节形态结构,设计高度和角度可调节的寰枢椎关节间融合器,结合临床后路内固定手术方案,建立枕骨–上颈椎悬臂复位技术结合寰枢椎关节间融合器的三维有限元模型,分析Ti/PEEK和Ti两种材料的寰枢椎关节间融合器对颈椎寰枢关节稳定性的影响、关节间融合器和C2终板的应力分布特征。探究可调节寰枢关节间融合器对颈部屈伸、侧弯和旋转运动时的生物力学效应,为临床手术方案实施和疗效提高提供理论依据。
2. 材料与方法
2.1. 建立BI-AAD上颈椎C0-C3有限元模型
基于一位患有颅底凹陷合并寰枢椎脱位患者上颈椎C0-C3节段的CT图像,以Dicom格式导入Mimics19.0中进行擦除和修复等操作,再以STL格式导入到Geomagic中对病变模型进行孔洞填补等深入修复并以椎体上下表面为基础建立椎间盘模型,最后利用有限元前处理软件Hypermesh14.0进行2D、3D网格划分,建立包括枕骨、椎体(皮质骨,松质骨和后部)、椎间盘(纤维环,髓核和终板)和以杆单元模拟的9种主要颈部韧带(前纵韧带、后纵韧带、黄韧带、棘间韧带、棘上韧带、覆膜、关节囊韧带、尖韧带和翼状韧带)在内的BI-AAD病变上颈椎三维有限元模型。上颈椎模型各部分材料属性和参数 [16] [17] 见表1。

Table 1. Material properties of the occipitocervical spine FE model
表1. 枕颈有限元模型的材料属性
2.2. 可调节寰枢关节间融合器联合后路内固定有限元模型的建立
可调节寰枢关节间融合器的设计依据畸形寰枢椎侧块关节影像学数据,长度为18 mm,宽度为9 mm,由上下撑开壳体,内支撑环,前后锥形螺栓及中间连接件组成,整体轮廓设计为流线型便于植入,上下表面设有锯齿状凸起增加摩擦力防止融合器在寰枢关节间滑脱,具体结构如图1所示。在医生指导下,依据BI-AAD患者寰枢关节病变程度,按照手术方案将关节间融合器角度调整至4˚,高度调整至8 mm,以提供寰枢椎间丢失的高度和角度确保患者颈椎恢复正常的生理曲度。
模拟手术所采用的内固定器械由医院提供:C2PS (长24 mm、直径3.5 mm)和OP (长44.99 mm、高27.54 mm、厚2 mm)。在三维制图软件Solidworks绘制内固定器械,并依据临床手术方案完成内固定器械及关节间融合器与BI-AAD模型的装配,几何模型按照手术方案进行配准,关节间融合器在双侧寰枢关节间水平放入。在Hypermesh软件中对装配好的三维模型进行网格划分,如图2所示的可调节寰枢关节间融合器联合后路内固定有限元模型。融合器与椎体间接触位置进行共节点处理,模拟椎间融合,关节间融合器上下壳体表面锯齿做简化处理。
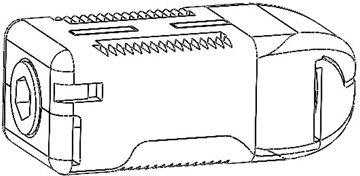
Figure 1. Schematic diagram of adjustable atlantoaxial inter-articular cage
图1. 可调节寰枢关节间融合器示意图
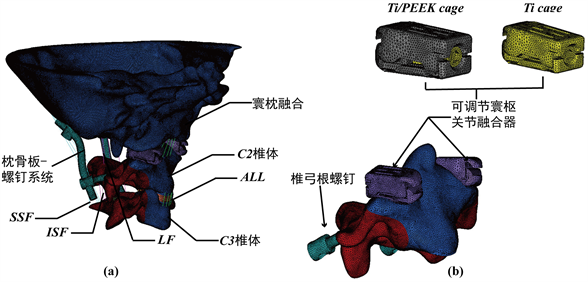
Figure 2. The three-dimensional finite element model. (a) Adjustable atlantoaxial inter-articular cage + C2PS + OP fixation; (b) Adjustable atlantoaxial inter-articular cage
图2. 三维有限元模型。(a) 可调节寰枢关节间融合器 + C2PS + OP内固定;(b) 可调节寰枢关节间融合器
2.3. 可调节寰枢关节间融合器联合后路内固定有限元模型的建立
关节间融合器材料目前应用最为广泛的是聚醚醚酮(PEEK)和钛(Ti),钛合金质量轻、屈服强度和疲劳强度高,但弹性模量较皮质骨过大,会增加融合器下沉风险 [18];PEEK材料因其弹性模量和力学特征与自体骨相似,可最大限度减少应力屏蔽,降低关节间融合器下沉的概率 [19]。有研究者发现钛–聚醚醚酮(Ti/PEEK)关节间融合器能同时兼备两者优点,增加关节间融合器生物力学刚度,形成比标准PEEK更坚固的椎间融合 [19]。因此,对所设计关节间融合器选择Ti/PEEK复合材料和Ti材料进行研究分析。
对动态可调节寰枢关节间融合器模型分别赋予不同材料:① Ti/PEEK cage (上下撑开壳体选择PEEK材料,其他结构选择钛合金材料)和② Ti cage (整体融合器均采用钛合金材料),具体材料性质 [16] 如表2所示。
Table 2. Different material properties of an adjustable atlantoaxial inter-articular cage in the three-dimensional FE model
表2. 三维有限元模型中可调节寰枢关节间融合器的不同材料特性
2.4. 可调节寰枢关节间融合器联合后路内固定有限元模型的建立
约束C3椎体下表面所有活动度,限制其6个方向自由度,枕骨上表面被耦合于上方中性点,载荷施加在中性点上。在中性点上施加50N的垂直载荷以模拟头部重力,同时施加1.5 N·m扭矩模拟颈部前屈、后伸、旋转和侧弯运动 [9]。C2-3小关节之间接触设置绑定以减少相对滑动,寰枢关节及寰椎前弓与齿状突关节间设置摩擦因数为0.1 [20] 的滑动接触关系。采用ABAQUS软件对模型进行计算,分析寰枢椎ROM、C2终板应力和关节间融合器各部分应力分布情况。
3. 结果
3.1. 寰枢关节活动度
BI-AAD病变模型联合C2PS+OP术植入Ti/PEEK cage (Ti/PEEK cage + C2PS + OP)和Ti cage (Ti cage + C2PS + OP)模型各工况寰枢关节ROM计算结果与静态融合器(Cage)模型对比如图3所示,BI-AAD模型寰枢关节在前屈、后伸、侧弯和旋转工况下的ROM分别为:11.28˚、5.30˚、3.54˚和10.37˚,Ti/PEEK cage使寰枢关节ROM降低了98.76%、97.36%、97.74%、97.97%;Ti cage使寰枢关节ROM降低了99.2%、97.74%、97.74%、98.07%;而Cage + C2PS + OP模型寰枢关节ROM减小了98.76%、97.92%、96.61%、98.07%,三组模型均使寰枢关节ROM显著降低,降低幅度相似。
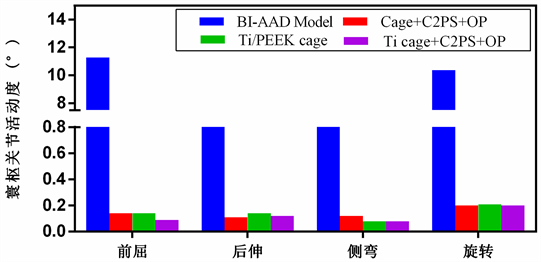
Figure 3. ROM comparison of atlantoaxial joint between C2PS + OP implanted cage (static cage, Ti/PEEK cage, Ti cage) model and BI-AAD model
图3. C2PS + OP术植入融合器(静态Cage、Ti/PEEK cage、Ti cage)模型和BI-AAD模型寰枢关节ROM比较
3.2. C2终板应力分布特点
融合器的沉降主要发生在与其相接触的下椎体表面 [21],C2终板应力分布情况有助于对融合器沉降风险的判断。将Ti/PEEK cage + C2PS + OP和Ti cage + C2PS + OP的C2终板应力分布和应力峰值与Cage + C2PS + OP进行比较分析如图4所示。在相同载荷条件下,C2终板应力分布情况相似,主要集中于椎体受压侧终板前端的后部,但应力峰值差距较大:Ti/PEEK cage + C2PS + OP模型的C2终板应力峰值除前屈工况略大于Cage + C2PS + OP组,为14.71 MPa,后伸、侧弯和旋转工况最小,分别为:25.58 MPa、19.04 MPa和12.25 MPa,其中旋转工况应力分布情况特殊,几乎分布于整个C2终板,应力集中现象较小。Ti cage + C2PS + OP模型C2终板的应力峰值在后伸时出现最大值,是Ti/PEEK cage + C2PS + OP模型的2.39倍。Ti/PEEK cage + C2PS + OP模型和Ti cage + C2PS + OP模型C2终板应力在侧弯和旋转工况下均小于Cage + C2PS + OP模型。

Figure 4. Stress nephogram of C2 endplate for Ti/PEEK cage + C2PS + OP model、Ti cage + C2PS + OP model and Cage + C2PS + OP models
图4. Ti/PEEK cage + C2PS + OP、Ti cage + C2PS + OP和Cage + C2PS + OP模型C2终板应力云图
3.3. 可调节寰枢关节间融合器应力分布特点
可调节寰枢关节间融合器结构复杂,内部结构应力峰值和受力情况及其分布是影响融合器力学特性及使用的主要因素,因此对可调节寰枢关节间融合器各部分结构应力分布特征及应力值进行分析是有必要的。
3.3.1. 上下撑开壳体应力分布特征
Ti/PEEK cage + C2PS + OP和Ti cage + C2PS + OP模型中可调节寰枢关节间融合器上下撑开壳体的应力分布如图5所示。Ti/PEEK cage + C2PS + OP组在后伸时,右侧关节间融合器下撑开壳应力分布相对较明显,主要集中在与前后螺栓的接触部位,应力峰值为21.38 MPa;侧弯时左侧融合器下撑开壳与后螺栓接触部位也出现较为明显的应力集中,应力峰值为20.73 MPa;前屈时上撑开壳应力峰值最小为6.39 MPa,上下撑开壳应力相差1.44 MPa。Ti cage + C2PS + OP模型关节间融合器下撑开壳体中间“H”部位也呈现出较明显的应力集中:后伸运动时应力峰值为174.1 MPa,是Ti/PEEK cage + C2PS + OP组的8.14倍,且高应力区域面积大于其余工况;侧弯工况下,下撑开壳体应力峰值为138.3 MPa是上撑开壳体的4.93倍,是Ti/PEEK cage + C2PS + OP组的6.67倍;前屈工况下,下撑开壳体应力值比Ti/PEEK cage + C2PS + OP组大2.58倍;旋转工况下下撑开壳体的应力峰值为74.69 MPa,为上撑开壳体的1.94倍。
3.3.2. 双侧支撑环应力分布特征
观察Ti/PEEK cage + C2PS + OP和Ti cage + C2PS + OP模型中可调节寰枢关节间融合器在屈伸、侧弯和旋转运动时左右两侧关节间融合器内支撑环的应力分布如图6所示。内支撑环应力分布趋势一致:应力较集中在内支撑环上下凸体处,且下凸体处应力集中更为明显,Ti/PEEK和Ti关节间融合器左右两侧内支撑环凸体处在后伸工况都呈现出最大应力值,Ti关节间融合器左侧内支撑环凸体处应力值达到181.30 MPa,是右侧的2.49倍,Ti/PEEK关节间融合器后伸工况左内支撑环凸体处应力值是侧弯时的3.47倍;而旋转运动时,上下凸体部位应力集中面积均较前屈和侧弯工况明显增加;Ti关节间融合器内支撑环上下凸体处应力集中现象更为明显。中间筒状结构承受应力较小,除旋转运动时,应力分布于旋转侧的整个内支撑环,其余工况应力均集中于上下凸体与筒状结构接触部位。

Figure 5. Stress nephogram of the adjustable atlantoaxial inter-articular cage superior and inferior shells under different motion conditions in Ti/PEEK cage + C2PS + OP model and Ti cage + C2PS + OP model
图5. Ti/PEEK cage + C2PS + OP和Ti cage + C2PS + OP模型中可调节寰枢关节间融合器上下撑开壳体不同工况下应力云图
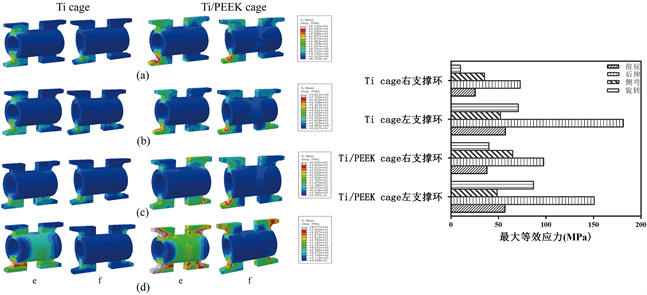
Figure 6. Stress nephogram of the supporting ring in adjustable atlantoaxial inter-articular cage under all conditions in Ti/PEEK cage + C2PS + OP model and Ti cage + C2PS + OP model, e represents left, f represents right: (a) Flexion; (b) Extension; (c) Lateral bending; (d) Axial rotation; (e) Comparison of the maximum equivalent stress of the supporting ring in Ti cage and Ti/PEEK cage models
图6. Ti/PEEK cage + C2PS + OP模型和Ti cage + C2PS + OP模型中可调节寰枢关节间融合器内支撑环在不同工况下的应力云图及应力情况,e代表左侧,f代表右侧:(a) 前屈;(b) 后伸;(c) 侧弯;(d) 旋转;(e) 两侧支撑环最大等效应力比较
4. 讨论与结论
关节间融合器对BI-AAD进行治疗已成为临床上有效的手术方法,相比单纯的后路内固定,关节间融合器可为寰枢椎提供可靠的稳定性和颈椎生理曲度的恢复,提高疗效 [22]。本文依据BI-AAD患者寰枢椎侧方关节形态研究结果设计了一种高度和角度可调节寰枢关节间融合器,保证原有静态融合器稳定效果的同时对高度和角度可进行调整,使关节间融合器更加贴合于椎体上下表面,降低沉降和塌陷的风险。
与静态融合器相比,可调节寰枢关节间Ti/PEEK和Ti融合器的ROM降低幅度相似,寰枢关节间的活动范围明显降低,上颈椎稳定性相对于术前BI-AAD有显著的提高,可调节寰枢关节间融合器植入寰枢关节后固定效果可达到静态融合器的稳定性。Ti/PEEK关节间融合器模型C2终板的应力最小,由于Ti/PEEK关节间融合器高度和角度可调节使关节间融合器更贴于椎体,受力面积增大,同时Ti/PEEK材料的弹性模量与骨组织相似,减少了应力遮挡,使得应力集中现象较静态融合器减弱,有效地减少了C2终板上的应力,降低了融合器下沉的风险,为手术提供更好的治疗效果。
对比两组可调节寰枢关节间融合器各部分结构应力结果,可能是由于力的传导使下撑开壳体应力值较大,而Ti关节间融合器上下撑开壳体间应力差值更大,应力集中现象更为明显,这可能是由Ti材料的弹性模量过高植入物在植入后须承担较大载荷导致的。Ti/PEEK关节间融合器各部分应力小于Ti关节间融合器各部分应力。但两组可调节关节间融合器的内部支撑环凸体折弯处应力集中明显,需要考虑疲劳强度较高的材料或对该部分结构进行优化,使该部分应力分布更为均匀,减少应力集中现象。
本文针对BI-AAD患者设计了一款可调节寰枢关节间融合器并联合后路悬臂技术,对比分析了静态融合器以及可调节寰枢关节间融合器植入后对上颈椎生物力学的影响,并分析可调节寰枢关节间融合器内部各组成部件的应力分布情况。仿真结果表明所设计可调节寰枢关节间融合器能够提供与静态融合器相近的稳定性同时可恢复患者颈椎本身的生理曲度,且Ti/PEEK关节间融合器能够有效地减小关节间融合器下沉风险。本文的模拟结果可为可调节关节间融合器生物力学性能的研究提供参考,其结构仍需不断完善和改进,为后续设计提供理论参考。
致谢
感谢马童医生,段婉茹医生和陈赞医生对文中手术模型和临床方案的指导。
基金项目
上海市卫健委科研课题201940249。
NOTES
*通讯作者。