1. 引言
手传振动是指在生产中使用手持振动工具或接触受振工件时,直接作用或传递到人体手臂的机械振动或冲击 [1]。大量流行病学证据表明,手持电动工具作业引起的手臂振动会对手臂造成多种有害影响 [2] [3] [4] [5] [6]。
国内外学者对手臂振动传递特性进行了相关研究,特别是在2007年董仁国等人建立两点驱动的四自由度与五自由度机械等效模型 [7],也是首次提出两点驱动思想,此后国内外学者在手传振动方向取得不错的进展。目前学者们主要是结合具体的工况,有针对性的对具体形式的振动情况进行分析,比如马文凯等人对手持便携式风力灭火机振动特性的研究 [8],文建等人对手持便携式气动灭火器振动特性的研究 [9],董仁国等人对手持研磨机振动特性的研究 [10]。然而手部作为振动源的直接接触者,在相关机械等效模型中被过于简化,无法很好的分析手持工具情况下,手臂的振动特性。
本文针对手传振动分析中国家推荐标准姿势,细化手部,建立肘角90˚弯臂人体手臂机械等效模型,对其进行生物动力学分析,分析其运动特性,建立其运动方程,计算其驱动点机械阻抗,利用matlab中fmincon函数识别模型中相关参数,为手臂振动病的防治提供依据。
2. 模型建立
考虑相关研究中的不足,以及对国家推荐标准姿势中手部抓握手柄情况进行分析,细化手部建立模型如下图1所示:
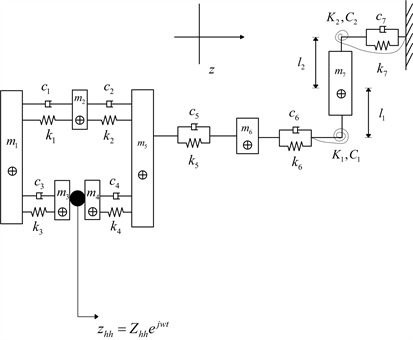
Figure 1. Six degree of freedom vibration model
图1. 六自由度振动模型
其中:m1、m2、m3、m4、m5、m6、m7分别表示手指其余部分骨骼、手指近指关节部分、手指其余部分皮肤、手掌皮肤、手掌骨骼、小臂、大臂的质量;k1、k2、k3、k4、k5、k6、k7分别表示相关连接部分线性刚度;K1、K2表示肘关节与肩关节处的旋转线性刚度;c1、c2、c3、c4、c5、c6、c7分别表示相关连接部分阻尼;C1、C2表示肘关节与肩关节处的旋转阻尼。
2.1. 模型分析
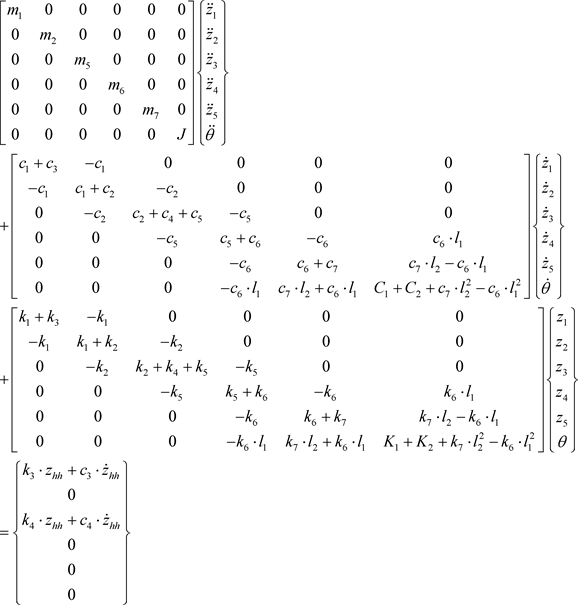
根据牛顿第二定律,建立其运动方程如下公式(1)所示:
 (1)
(1)
将公式(1)写成矩阵形式如下:
(2)
式中
表示模型的运动方程的六阶质量矩阵;
表示模型的运动方程的六阶阻尼矩阵;
表示模型的运动方程的六阶刚度矩阵;
表示模型的运动方程各质量块的加速度矢量;
表示模型的运动方程的各质量块的速度矢量;
表示模型的运动方程的各质量块的位移矢量;
为运动方程激振力矢量。
2.2. 驱动点机械阻抗计算
驱动点机械阻抗与驱动点有关,描述手臂振动整体情况,其表达式如下:
(3)
其中:i表示激励点位置,
表示i点机械阻抗,
表示i点受力,
表示i点的速度。
因而,手指侧机械阻抗表达式为:
(4)
手掌侧机械阻抗表达式为:
(5)
总机械阻抗为手指侧与手掌侧机械阻抗之和,故总机械阻抗表达式如下:
(6)
3. 参数识别
3.1. 模型中参数
由运动方程可知,共有25个参数待识别,设待识别参数矩阵为
,则
表达式如下所示:
(7)
3.2. 参数约束条件
模型约束条件对模型可靠性有一定影响,因此合理的模型约束是有必要的。参考文献 [7] [9] [10] 中得到的模型参数,定义各参数约束条件如下:
3.3. 实验数据
本研究中使用的实验数据来自先前的研究 [11]。在这项研究中,7名受试者参与了对暴露在三维振动下的手指和手掌的驱动点机械阻抗分布的测量。在2.5~2500 Hz范围内的宽带随机振动被用作每个方向的激励。测试时,每个受试者被指导直立站在测力板上进行推力测量,并抓住一个仪器手柄进行振动和握力测量。手臂弯曲角度被控制在90˚左右;测量时肘部未与身体接触。手力分别为10,30,50 N握力与25,50,75 N推力的组合。其中这些受试者的姿势和手力组合中30 N握力与50 N推力的组合类似于国家推荐标准 [12] 中推荐的平均阻抗数据,故以此种力的组合形式得到的实验数据为原始数据,计算7人平均机械阻抗幅值与相位。
3.4. 参数识别
以最小化实验与模型机械阻抗与相位数据为目标函数,建立误差方程,利用matlab优化工具箱中的fmincon函数进行相应约束条件下的参数识别,参数识别结果如表1所示。
(8)
其中
、DPMI分别为由实验测量数据和模型预测数据得出的机械阻抗幅值,Re、Im分别为机械阻抗的实部分量与虚部分量。

Table 1. Model parameter identification results
表1. 模型参数辨识结果
4. 结果与讨论
将参数识别结果带入模型中,得到的结果与实验测量数据比较如图2所示。结果表明机械阻抗幅值在全测试频段中一致性较好,而相位在10 Hz以下低频段中结果相差较大,高频段一致性较好。这些差异的产生原因主要是阻抗响应的良好阻尼特性,手指近指关节部分的组织、肌肉和骨块聚集在一起形成刚体,以及模型中组织、肌肉和关节粘弹性特性的集总表示。
10到500 Hz是大多数手持工具操作所受振动频率范围 [13],从图中可以看到在此范围中机械阻抗幅值与相位一致性较好,说明此模型对大多数手持振动工具情况符合。
对机械阻抗幅值与相位实验数据与模型数据进行相关性分析,计算其相关系数分别为0.936,0.975,表明所建立模型合理,可以较好地预测生物力学相应。
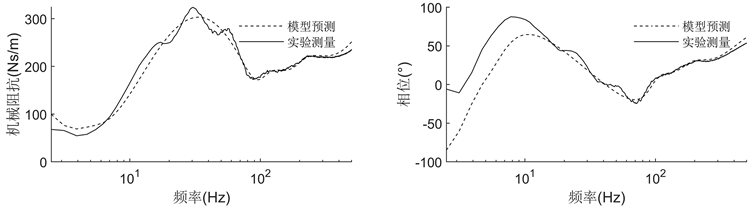
Figure 2. Comparison of amplitude and phase identification results of mechanical impedance
图2. 机械阻抗幅值、相位辨识结果对比
5. 结论
1) 依据人体握持振动工具姿势,建立人体弯臂集总参数模型,依据已有实验数据,利用matlab优化工具箱中fmincon函数进行相应约束下参数识别,得到模型未知参数。
2) 依据模型参数辨识结果,将结果代入到人体弯臂集总参数模型中,计算相应的机械阻抗幅值与相位,将所得数据与实验中的机械阻抗幅值与相位数据比较,其相关系数均大于0.93,表明所建模型可以较好地预测人体手臂生物力学响应,可为手臂振动病的防治提供依据,并且所提出的模型也可用于减振手套的设计与评估。