1. 引言
中国道路基础建设发展迅速,根据交通运输部数据显示,2017年末我国公路总里程477.35万公里,公路密度达49.72公里/百平方公里 [1],道路问题如路基沉降、沥青破损、路面开裂、道路塌陷等随之增加。道路内部病害随着时间的推移慢慢形成,因此需要利用检测技术分析道路内部存在的病害并及时治理。电磁波具有的衰减特性和地下介质的复杂性,使得雷达探测技术受到诸多限制,探物历史上首个电磁波探测系统只能用于探测冰层厚度岩石和煤矿等。为了解决路面摊铺施工和全过程的质量管理问题,2017年苏尚武 [2] 等利用探地雷达基于厚度恒定法对介电常数进行反算,建立空隙率与介电常数之间的关系,合理评价沥青路面施工的均匀性。2017年王留涛 [3] 对高等级公路路基施工技术、路基施工质量、路基沉降及稳定监测问题进行分析并提出合理建议。段彬 [4] 等为探地雷达探测工作的前期准备、雷达数据采集与分析等关键性技术问题提出合理建议。王晓鹏 [5]、程甄 [6] 利用探地雷达技术识别道路内部异常及进行道路检测,充分为保护居民人身和财产安全提供保障。李世念 [7] 等利用基于三维FDTD方法原理的GprMax 3D软件,针对充气型和充水型空洞病害开展三维探地雷达正演模拟工作,并对三维雷达数据体的图像特征进行分析。国外学者利用无损检测方法对道路进行的评估包括:2014年Peter A. Torrione [8] 等探讨了一种现代计算机视觉特征提取技术与探地雷达数据探测之间的关系,将探地雷达数据进行处理后,结果表明计算机视觉中的某些技术可以应用于GPR数据中的目标检测。为了获得路面层的厚度数据,Vânia Mareco [9] 等利用选定点提取岩心的厚度信息基于探地雷达法对柔性路面承载力进行评估。
以上文献列举了在道路检测过程中使用的检测手段以及对道路问题评估的重要性,本文就道路内部充水和充气病害进行模型试验并展开简单研究和讨论。
2. 物理模型设计与制作
2.1. 道路试验模型箱
本次采用的是生态板搭建的模型箱,尺寸为120 cm × 60 cm × 60 cm,为保证强度连接方式采用角铁和钉子,通过填砂来模拟道路地下空间。道路模型箱和空洞病害设置如图1和图2所示。
2.2. 模型测线布置
为了避免空间假频的出现,测线间距通常取波长的1/3。图3测线布置图中横向为X轴,纵向为Y轴。X轴分为48条测线,每条测线间的间距为2.5 cm;Y轴分为24条测线,每条测线之间的间距为2.5 cm。

Figure 3. Line layout (Crosswise: X-axis, Lengthways: Y-axis)
图3. 测线布置图(横向为X轴,纵向为Y轴)
3. 试验模型探地雷达图像分析
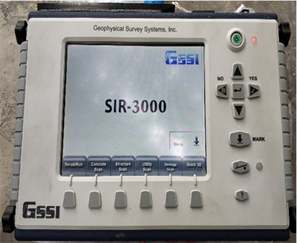
本次模型试验检测仪器采用地球物理测量系统公司(GSSI)发明的SIR-3000系列,SIR系列是目前探
地雷达设备系统中最为完善与便捷的一种。图4(a)和图4(b)所示是SIR-3000型号探地雷达产品的组成器件。
 (a)
(a)  (b)
(b)
Figure 4. (a) SIR-3000 ground penetrating radar main engine; (b) 1600 M antenna
图4. (a) SIR-3000探地雷达主机;(b) 1600 M天线
探地雷达探测时发射固定频率,但是由于目标体介质的差异,导致对不同频率信号的吸收不同,在剖面上反射波的频率就会发生变化,可以通过这种频率成分差异来分析不同介质 [10]。图5所示图像为通过RADAN7雷达图像处理软件得到的不同材质和不同填充物扫描得到的雷达波形图。
A、B分别为直径7 cm的金属管道和直径4 cm的PVC管道。其下表面放置在同一水平位置,金属管道上表面比PVC管道高3 cm。电磁波先穿过砂传递到预埋较浅的金属管道上表面并发生反射,当电磁波传递到预埋较深的PVC管道上表面时需要更长时间,因此从图中可以看出两道反射波之间有时间差。从雷达波形图还可以看出,A目标体反射波的强度远远高于B目标体反射波的强度,这是由于电磁波很难穿透金属管道,大部分能量被金属反射回去才形成明亮的黑白相间的反射波形图。电磁波到达PVC管道上表面时已经衰减,并且电磁波可以穿透PVC管道,因此其反射波形图没有金属管道反射波形图明显。
C、D分别为直径5.5 cm的充水和充气空洞。两种空洞预埋的上表面距离检测面的距离一样,从反射波形图中可以看出它们出现反射波的时间相同。对比填充物不同时的波形图,充水空洞反射波更明亮,说明充水空洞对电磁波的反射更强烈。还可以观察到在充水空洞波形图下方约6.6 ns处还有一组反射波,由于空气和水的相对介电常数分别为1和81,电磁波在空气中的传播速度远大于在水中的传播速度。充水空洞病害的上、下两道反射波亮度不一样,原因是电磁波的能量被水吸收了一部分,导致下表面反射能力较弱。
4. GprMax数值模拟
4.1. GprMax基本原理
GprMax是一款可以模拟电磁波传播的开源软件,主要用于GPR的数值模拟,它利用时域有限差分(FDTD)方法求解三维Maxwell方程组。FDTD方法优点在于它是一种简单、完全显式、通用和健壮的技术,缺点是整个计算域必须离散化,可能需要大量的计算资源 [11]。
4.2. GprMax正演模拟图像分析
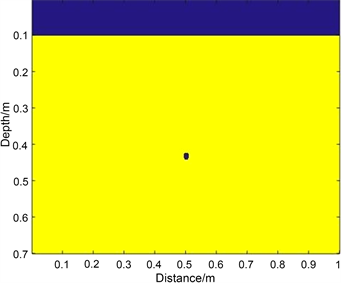
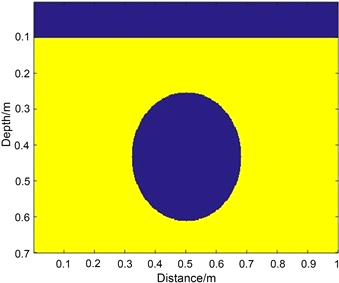
为了研究不同空洞大小对探地雷达探测的影响,在不同模型箱尺寸中设置了圆形空洞,其填充介质为空气。空洞半径R = 1 cm、12 cm、18 cm,位于模型水平方向的中心位置。正演模拟参数设置为:模型箱尺寸100 (cm) × 70 (cm),天线中心频率1600 MHz,测线间距2 cm,时窗16 ns,发射天线坐标(8.75 cm, 8 cm),接收天线坐标(11.25 cm, 8 cm)。
GprMax软件通过时域有限差分法计算麦克斯韦方程组,为了简化计算过程、缩短计算时间,计算时需要在GprMax中假设以下条件:
1) 假设模型中的介质是各向同性介质。
2) 当模型结构中没有包含GprMax天线时,则假设GprMax2D中的天线为线源。
3) 假设材料的应力应变模型参数相对稳定,不随频率的变化而改变。
从图6~8可以看出,模拟空洞半径越大,正演模拟反射波弧形半径越大、延展度越高、更容易识别。空洞直径越小,正演模拟中的弧线数量就越少且清晰度不高,甚至会出现无法识别的情况。较大空洞缺陷还可以根据波的特征计算缺陷界面大小,而较小空洞缺陷虽能显示位置,但不能通过模拟结果得到空洞的面积。
 (a)
(a) 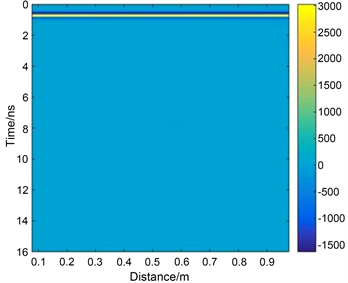 (b)
(b)
Figure 6. (a) Model diagram with a cavity radius of 1 cm; (b) Forward simulation diagram with a cavity radius of 1 cm
图6. (a) 空洞半径为1 cm的模型图;(b) 空洞半径为1 cm的正演模拟图
 (a)
(a) 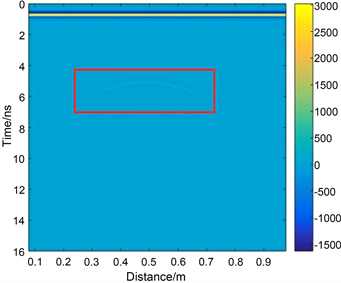 (b)
(b)
Figure 7. (a) Model diagram with a cavity radius of 12 cm; (b) Forward simulation diagram with a cavity radius of 12 cm
图7. (a) 空洞半径为12 cm的模型图;(b) 空洞半径为12 cm的正演模拟图
 (a)
(a) 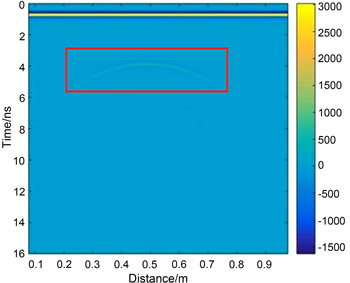 (b)
(b)
Figure 8. (a) Model diagram with a cavity radius of 18 cm; (b) Forward simulation diagram with a cavity radius of 18 cm
图8. (a) 空洞半径为18 cm的模型图;(b) 空洞半径为18 cm的正演模拟图
本章数值模拟结果与第三章物理模型试验结果作对比得出:空洞直径越大,雷达波形图中反射波就越明亮,对应的正演模拟中的反射波半径也越大、轮廓越清晰。
5. 结论
1) 本文研究了不同介质目标体、不同大小目标体和不同填充物目标体形成的雷达波形图。不同埋深目标体出现在雷达反射波形图中的先后位置有区别,埋深越浅对应波形出现越早,可以大致判断不同目标体之间的相对位置。
2) 利用探地雷达对地下金属管道和PVC管道的检测图像,观察到金属管道的反射波很强烈,如果探测的目标体位于金属物下方,那么金属对电磁波的强烈干扰将会影响探测结果,甚至会无法探测,建议在利用探地雷达进行探测时尽量避开金属介质,可以减少电磁波干扰从而得到理想的探测结果。
3) 从充水空洞和充气空洞的探测结果可以分析物体的相对介电常数是影响探测结果的关键因素,电磁波在穿过两种介质时会形成两种有时间差异的波形图。
4) 基于GprMax软件模拟了不同目标体大小所形成波形图的特征,不同目标体大小无干扰时的模拟,可以大致判断其埋深和大小,数值模拟结果与实验结果基本符合。
本次模型试验和正演模拟中由于空洞模型的材质和大小不同,导致试验结果有明显区别。将第三章和第四章分析后的结果进行对比:模型试验中的雷达反射波和GprMax正演模拟中的反射波特点一致,对应图像的明亮度和清晰度都随着半径的增大而成正比。本文研究过程和研究结论为相似模型试验提供参考依据,同时为实际工程研究提供理论依据。