1. 引言
全面推行河长制是以习近平同志为核心的党中央从人与自然和谐共生、加快推进生态文明建设的战略高度作出的重大决策部署,是破解我国新老水问题、保障国家水安全的重大制度创新。一年多来,在党中央、国务院的坚强领导下,在各地各部门的共同努力下,河长制工作取得重大进展,提前半年实现全面建立河长制目标,河湖管理保护进入新阶段。
2016年12月,中国中共中央办公厅、国务院办公厅印发了《关于全面贯彻落实河长制的意见》,并发出通知,要求各地区各部门结合实际认真贯彻落实。
湖南省是一个河流众多,水系发达的省份。要全面贯彻落实《关于全面贯彻落实河长制的意见》提出的相关问题,有必要对本省水系水下地形和河流两岸的地理信息数据进行完善和更新。同时合理的水下地形及河流两岸的地理信息数据获取,可以为航道整治、管理,水运畅通,水库动态监测、流域智能决策系统等关乎民生的大事提供有力的数据支撑。而且目前的湖泊、河流地理信息数据相对比较缺少,因此有效、有序开展水系水下地形和河流两岸的地理信息数据采集工作尤为重要和迫切。
2. 主要工作任务
本项工作内容是以湘江长沙段为试点河段,并对其进行水下地形测量和河道地理信息补充采集。包括:
1) 近岸全景影像与点云采集:根据湘江宽度,考虑近岸全景与点云沿两岸分别采集。采集总长度为:74 × 2 = 148 km。
2) 水下地形测量:试点河段里程为74 km。
具体范围见图1红线断所示。
3. 实施方法
1、数据采集
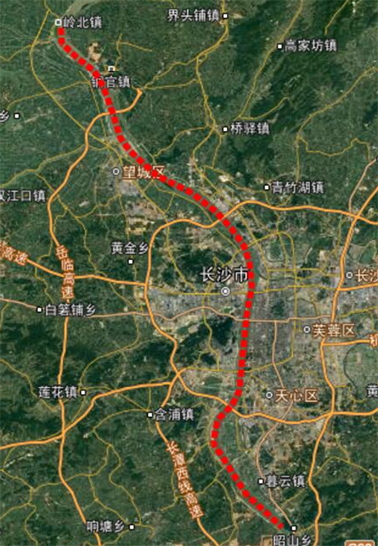
Figure 1. Schematic diagram of the test area
图1. 试点区示意图

Figure 2. Onboard 3 d laser moving measurement system
图2. 船载三维激光移动测量系统
1) 近岸全景点云数据采集
采用船载三维激光移动测量系统 [1] 进行移动式采集,它是以三维激光扫描技术、GPS/IMU惯性测量技术、全景数据采集技术和智能数据处理技术为基础,开发的一个面向水岸三维地形高精度的三维激光移动测量系统。
船载三维激光移动测量系统集成当前空间信息获取和处理的最新技术——多传感器集成的船载三维激光扫描测量技术、GPS/IMU自主定位定姿技术等,对水利工程(包括航道、水库)水上三维地形数据进行机动、灵活、快速的采集、处理和分析,建立数字水利高精度的三维空间数据库。船载三维激光移动测量系统见图2,近岸全景点云生产流程见图3。
2) 全景数据输出
a) 全景影像拼接
采用专业软件对全景影像进行拼接处理。见图4近岸全景图。
b) 全景影像检查
①采用人工方法检查全景影像中存在的相机镜头被异物遮挡影像、色彩失真影像、曝光不足影像、
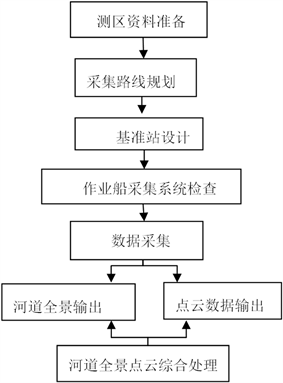
Figure 3. Production flow chart of cloud data of all scenic spots near shore
图3. 近岸全景点云数据生产流程图
曝光过度影像及拼接错位影像。
②对合格影像进行隐私信息处理。
③全景影像安全处理。
c) 全景影像定位点输出
采用专业软件,解算出高精度的船载轨迹线及全景数据每个站点的定位坐标。
3) 点云数据输出
点云与全景同步采集,共用一套POS数据。使用点云处理软件 [2] 加载原始点云数据和POS数据,可输出通用格式*.las的点云数据。如图5所示。
4) 全景点云影像综合处理
a) 点云及全景影像数据完整性检查
点云数据完整性检查,主要是针对点云、全景影像及索引文件是否存在及完整性进行检查。以方便随后的影像配置和全景生产应用。
b) 点云过滤与编辑
通过自动过滤方式,过滤点云噪点。然后人工检查,处理未能自动过滤掉的噪点和修补因自动过滤引起的点云破坏位置。
c) 点云精度提升
根据控制点进一步提升点云精度。
d) 影像与点云配准
将采集获得的点云数据和影像数据进行融合解算处理,使点云与全景影像一一匹配。同时排除外因界其他因素的干扰,使全景影像发生旋转、偏移造成全景影像不能很好的与点云进行匹配情况。见图6河道点云与全景配准效果图。
e) 线划数据采集
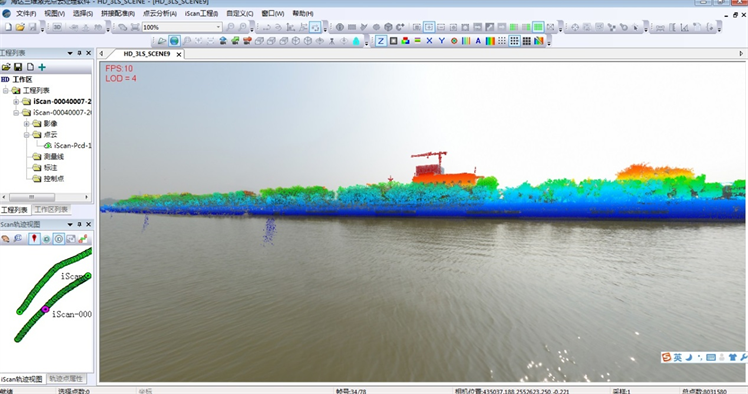
Figure 6. Matching effect of river point cloud and panorama
图6. 河道点云与全景配准效果图
将处理好的点云数据,在相应的数据采集平台加载,以点云数据为基础,按照地形图相关规范要求,进行线划数据采集。
f) 套合已有DOM进行调绘编辑
将采用点云数据采集的线划数据套合不动产DOM,进行外调绘补充,并编辑形成相应的河岸地形图。
5) 水下地形测量数据生产
水下地形测量是利用声波的反射时间来计算该点的水深,通过使用单波束回声测深仪测量,每次都能测定一个水深数据点,通过连续测量、记录,最后进行内业处理绘制水深图。并通过多波束测深仪发射换能器发出一个声脉冲,在水中传播并被水底或行进中遇到的其他物体所发射。反射信号同时被探头内数百个独立的声学基元接收。然后根据水深图来绘制水下地形等深线和断面图。
水下地形测量数据生产流程(图7):
水下地形测量数据生产
a前期准备
a) 控制点数据收集与施工区位置确定
b) 测深仪测试
1) 稳定性测试:对所有即将投入使用的测深仪进行稳定性测试,按固定时间间隔采集水深数据,连续测量时间超过8小时,然后统计水深值离散情况,计算中误差。
2) 静态吃水测定:按测量时换能器的实际入水深度,调节测深仪的数字和模拟记录,使其吃水深度与换能器入水深度一致,实现换能器的吃水改正。
c) 测深仪安装
1) 换能器安装位置
换能器安装在船首约1/3船长处,吃水深度 > 0.5 m。同时确保GPS-RTK、单频测深仪两者处于同一铅垂线上(否则测后进行归心改正)。见图8。换能器安装图。
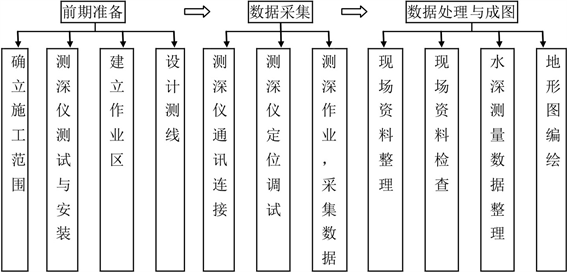
Figure 7. Production flow chart of underwater topographic survey
图7. 水下地形测量生产流程图

Figure 8. Installation diagram of transducer
图8. 换能器安装图
2) 换能器的固定
固定换能器的方法采用绑定测深杆加拉绳兜底加固。
3) 测深仪的连接
连接好换能器后,接上电源、定位系统、测深仪主机和外围设备,使用12 V直流稳压电源,使用对应的电源电缆,测深仪即安装好。开机测量时,导航软件实时采集测深仪输出的数字式水深信息和GNSS-RKT输出的定位数据,并在测深仪的模拟记录上同步进行打标,以便核查。水深采集记录至0.01 m,测深仪模拟记录读数精度为±0.1 m。
d) 设置坐标系、投影及转换参数,建立作业任务。
1) 设置参数要点:
定位参数:为了保证定位精度,减小多路径效应的不利影响,采用GNSS-RTK测量时,GNSS定位所用卫星的高度角设置为大于10˚,观测卫星数 ≥ 4,记录限制设置为“RTK固定解”模式,即当流动站GNSS接收机初始化成功(固定)后才能记录有效位置。
吃水:换能器吃水深度的量取要从水线至换能器的底部,量取值就是吃水深度值,也就是要设定的换能器吃水值。
声速:在不同的季节和不同的水域(包括不同的水温)声速都会有差别,淡水和海水的声速也有差别,所以测量前后都校对或检查测深仪。校对测深仪的主要方法采用检查板的方法来校对。从不同深度的校对中找出误差值后进行声速调整,把误差消除到最小。声速应在水深测量前、后各测定一次(表1)。
e) 测图区域测线设计
多波束覆盖宽度可按下式计算:
式中:S为多波束覆盖宽度;
θ为波束覆盖角度;
H为水深。
测图区域测线设计见图9,测线布设示意图。
a) 开始测量前,与定位设备校对时间,启动海洋测量软件,打开导航文件并设置好定位参数和记录参数,使测深仪与计算机端口通讯连接,进入测量状态,为测船导航,引导测船进入测线位置进行测点定位和测深,并根据软件的偏航显示数据,随时修正测船的航向,使测船始终沿着主测线方向航行,按同样的方法施测全部测线。
b) 数据采集采用GPS-RTK模式作业,在作业中注意对基站选择、电台天线高、流动站与基站距离等影响精度的因素进行严密检查,确保数据采集精度。
c) 流动站与测深仪的联机调试,在作业中应注意在RTK接收机、测深仪进行连接后,对通信信号及RTK定位坐标进行了必要检测与检查,确保仪器的正常工作与测深定位的准确性。
d) 测深作业时,在保证获得固定解的同时,按1次/秒进行数据采集。
e) 检测线的测量方法及测量精度与主测线相同。检测线的定位点间距可以根据测量比例加密至在规定范围内与主测线保证有重合点。要求每一条检查线与主测线的交叉点都进行比较,对无法比较的离散测点,根据绘制的水下等高线进行图解。
f) 由于在测量过程中,计算机按规定的测点间距进行测点定位和测深,所以水下地形特征点(最深点、最浅点)有可能漏测,内业整理时,根据测深仪测深记录上的模拟记录信号,在原始每秒数据中提取特征

Table 1. The direction of the sounding line is specified
表1. 测深线方向规定
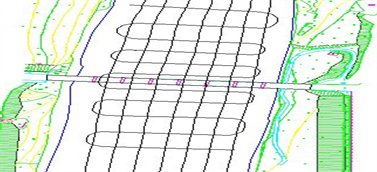
Figure 9. Schematic diagram of survey line layout
图9. 测线布设示意图
点三维坐标及水深。
g) 航行要求
1) 调查船尽量保持匀速、直线航行;
2) 船只在线测量时,航向变化不大于5˚/min;遇到特殊情况停船,转向或变速时,及时定位;
3) 更换测线时,尽量缓慢转弯;
4) 实际航线与计划测线的偏离不大于测线间距的25%;
5) 测量过程中测船前后左右摆动不宜过大,当风浪引起测深仪记录上回声线波形起伏值较大时、波浪超过0.6 m时暂停测深作业。
数据处理与输出编辑成图
a) 现场资料整理
1) 有效测线完整性检查;
2) 结合航迹水深点图,确定水深补测和加密;
3) 数据备份。
b) 现场资料检查
作业组对班报记录和测量数据进行检查和浏览,检查班报记录和测量记录是否完整、数据质量是否可靠;并进行数据备份。检查情况记入当天的班报记录。
测量工作结束后,要对所获得的测量资料进行全面检查,检查合格后方可进行内业数据处理。
c) 水深测量数据处理
1) 采用专业数据处理软件处理水深数据:各阶段的数据处理前应进行检查,确保数据成果的准确无误。
2) 定位数据处理的项目:位置偏心改正。当定位中心与测深中心两者水平位置不重合时,需根据测定的偏心距进行测点位置归算。
3) 粗差数据剔除与修正:对时间出现异常的测点进行时间修正,对位置出现异常的测点,视情况修正或剔除。
4) 水深数据检查校对:结合测深仪记录或测深仪电子图像数据,对所有测线记录水深数据进行校对,剔除或修正水深粗差点,并对波浪部分进行平滑处理。
5) 换能器吃水改正:根据测定的静、动态吃水参数,对测线数据进行各项改正。
6) 声速改正:根据校对法或声速剖面仪法计算获得声速改正数进行此项改正。
7) RTK模式的水深数据处理:该作业模式的数据处理将传统的换能器吃水、潮汐、涌浪等动态效应的影响进行综合改正。
8) 由于施测中设定测点间距为固定值,有可能存在水深特征点(最深点或最浅点)漏测,而测深仪存有记录,在处理时可以根据测深纸中的记录按比例内插,最后编制成水下地形三维数据文件。
9) 合理性检查:由作业人员对计算机采集的数据记录进行卫星数、卫星质量、测深数据等要素进行校核,无误后方可参与测点高程计算,并结合该水域的水下地形趋势,校核测量成果数据的合理性。
d) 地形图编绘
1) 编绘内容
岸线及岸线至水崖线地物编绘:岸线及岸线至水崖线地物采用点云加人工测量的方法进行更新。
等高线:水下地形图是以等高线的走向和疏密程度来反映测区地形分布特征的,等高距的设计以能反映测区地形走向和陡缓变化程度为基础。根据测区水下地形变化特征,将测区的等高距设计为1 m。
地形图绘制:将经过合理性检查、计算、校对后正确无误的测点三维数据输入在AutoCAD平台下二
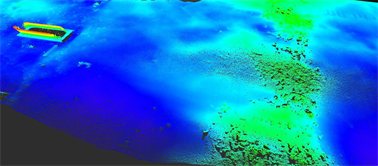
Figure 10. Multibeam underwater topographic data map
图10. 多波束水下地形数据图
次开发的专业制图软件,绘制地形图。根据水下测点高程,绘制地物、地貌,注记地图信息,按相应比例尺制成各测区的地形图打印稿,由参加外业的专业技术人员根据现场实际情况逐项进行分析、检查要求编制成数字水下地形图。在配合点云采集、调绘获得的水岸地形数据综合处理,获得水上水下综合地形图。利用相应软件,编辑处理水下地形数据,获得水下DEM。如图10。多波束水下地形数据图。
4. 结论
1) 综合考虑湖南省省情,结合已有地理信息数据,对本项目确定的试点河段进行河道全景数据采集、河岸点云采集、水下地形测量等工作,最终形成近岸及水下综合地形图及全景影像数据。
2) 根据需求导向,到数据利用的相关部门征求意见,从顶端设计,将数据成果应用起来,开发相关的管理系统,满足河长制建设或其他行业对水下地形测量的应用需求。
3) 结合河长制内容,形成一套适用于河长制管理的数据标准,逐步推广至全省的水下地形测量,逐渐形成一套省内标准规范。