1. 引言
随着“工业4.0”、“中国制造2025”的提出以及人工智能和5G技术的快速发展,制造装备的自动化需求不断释放,新兴的智能制造在我国工业发展中的比重逐渐增多,智慧物流的重要性也越来越明显,因此企业普遍会引入更多数字化、智能化的设备。随着智能制造2025时代步伐的逼近,带自动导引装置、能沿着规定的引导路径行驶且有安全保护和各种移载功能的自动导引车(Automated Guided Vehicle,简称AGV),在加上其高自动化、高灵活性、高效率以及能并行作业等特点,无疑受到了重点关注 [1]。
近年来人们生活水平逐渐提高,在物流、医药、家电、农业等各个行业中,普遍存在运输任务量大且繁琐的现象,这极大消耗了人力资源,而作为集自动化为一体的移动式机器人设备,AGV产业迎来蓬勃发展。AGV小车的应用使得各个产业的发展更加快速,提高生产效率,减少人力消耗,优化资源,降低成本 [2]。在运输货物的过程中,如何将载有货物的AGV从一个位置规划行驶路径搬运到另一个位置显得格外重要,而在搬运途中会受到位置姿态路径的影响,所以为了更好地应用AGV,了解其关键技术——导航技术是非常有必要的。
因此本文系统地查阅了国内外AGV导航技术文献,并对其现存的导航技术进行了分类,阐述了其应用场景,指出了现有的导航技术存在的不足和改进方向。
2. AGV导航技术
按照AGV搬运货物和运输方式的不同,AGV主要分为叉车式、牵引式、顶升式这三种 [3] [4],示意图如下图1~3。而导航技术是AGV技术研究的核心部分之一,它能让AGV“知道”自己所处的位置,并指引其运行方向和路径。常见的AGV导航方式有很多,并且目前大部分已经得到了成熟的应用。按照AGV是否铺设外部设备,将其导航技术分为了固定路径导航、自由路径导航和组合导航三种方式。
2.1. 固定路径导航方式
固定路径导航是指将导航用的外部设备铺设在AGV小车行驶的路径上,AGV通过采集到它的信息而得到导向的一种方式,主要有电磁导航、光学导航等 [5] [6]。
2.1.1. 电磁导航
电磁导航是将加载导引频率的金属线埋设在AGV行驶的路径中,通过车载电磁传感器传递电磁场,AGV识别出导引频率的强弱和跟踪并实现导航 [7],是比较传统的一种导航方式,如下图4所示。电磁导航根据铺设的电磁设备不同可以分为磁带导航和磁钉导航。

Figure 1. Schematic diagram of forklift AGV
图1. 叉车式AGV示意图

Figure 2. Schematic diagram of traction AGV
图2. 牵引式AGV示意图

Figure 3. Schematic diagram of jack-up AGV
图3. 顶升式AGV示意图
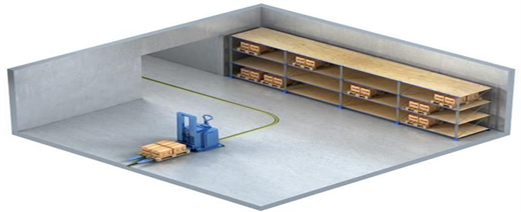
Figure 4. Schematic diagram of electromagnetic navigation AGV
图4. 电磁导航AGV示意图
电磁导航的主要优点是金属线埋在地下,隐蔽性好,不易损坏,导航原理简单可靠,对声光无干扰,制造成本低,技术成熟。缺点是金属线的铺设比较麻烦,很难改变和扩大路径,而且电磁感应容易受到金属等铁磁性物质的影响。
2.1.2. 光学导航
光学导航是指在AGV小车的行驶路径上设置光学标记,通过车载光学传感器获、取图像信号识别来实现导航的方法 [8]。光学导航根据铺设的光学设备不同可以分为红外导航和二维码导航。
光学导航的主要优点是路面更容易铺设,扩大和改变路径更容易引导,成本更低。缺点是需要在项目现场铺设大量光学设备,对环境条件要求高,且易磨损、需定期更新、维护成本高,导轨的可靠性受地面条件影响,导致定位精度低。光学导航适用于工作环境清洁、地面平整、AGV定位精度不高的场合。
2.2. 自由路径导航方式
自由路径导航是指AGV未预先确定行驶路径。主要有光学导航、GPS导航、惯性导航等 [5] [6]。由自由路径导航代替固定路径导航已经成为了一种大趋势。
2.2.1. 光学导航
光学导航是指在AGV小车的行驶路径上铺设光学设备,通过车载光学传感器获取图像信号识别来实现导航的方法,如下图5所示。光学导航根据设备方式的不同分为主动光学导航(激光导航)、被动光学导航(视觉导航)。

Figure 5. Schematic diagram of optical navigation AGV
图5. 光学导航AGV示意图
激光导航一般是指基于反射器定位的激光导航。AGV通过激光扫描仪发射出激光束,在行驶路径周围的多组反射器会将其直接反射回来,控制器通过旋转激光头得到反射器的角度值,从而计算AGV的绝对坐标 [9] [10]。
视觉导航是指在AGV小车上安装视觉传感器来获取行驶区域周围的图像信息进而实现导航的方法。AGV在移动过程中捕捉到地面纹理后会自动构建地图,然后将其与自建地图中的纹理图像进行比较,利用相位相关法计算两幅图像之间的位移和旋转,然后积分估计得到AGV的当前位置,从而实现AGV的定位导航 [11]。
光学导航的主要优点是AGV路径可以灵活规划,定位准确,施工方便,能适应各种实际环境。缺点是成本较高,且当行驶区域较大时,所花费的时间要长。
2.2.2. GPS导航
GPS (Global Positioning System)导航是指在AGV上搭载GPS传感器来获取位置和航向信息实现导航的方法。
GPS导航的主要优点是导航精度较高,实时定位速度快,覆盖范围广,操作简单。缺点是易受气候、电磁波等的影响,且需要在视野开阔、障碍物较少的区域进行。主要用于汽车、轮船、手机等的定位,不适用于室内定位。
2.2.3. 惯性导航
惯性导航使用AGV的内部传感器来获取位姿,主要有光学编码器,陀螺仪,或两者兼而有之。在装载有光电编码器的AGV运动过程中,利用编码器的脉冲信号进行粗略航位推算,确定AGV的位姿。使用陀螺仪可以得到AGV的三轴角速度和加速度,通过积分运算得到位姿信息,可以将两种航位推算结合起来 [12]。
惯性导航的主要优点是在短时间内定位精度高,隐蔽性好,抗干扰性强。缺点是因为位姿信息需要经过积分操作得到,定位误差会随着运动时间累积,长期精度差,设备价格较高,开始使用时需要的初始校准时间较长。因此,一般情况下,惯性导航会作为其他导航方式的辅助定位。
2.3. 组合导航
以上提到的各种方法都有其相应的优缺点,在特定的场景下难以实现性能的最优。而组合导航是指根据导航功能互补的特点,以适当的方法将两种或者两种以上的方法将其组合,提高系统的整体导航精度、实时等性能,来实现AGV小车运行的方法。所以,组合导航渐渐被人们所重视。根据应用场景,针对提高AGV性能的导航方式对其进行组合,可以将方法之间的优势都体现出来,解决了单一方法的缺点,因此组合导航方法有时能取得更佳的结果,比如视觉/惯性组合的AGV导航方法 [13]。
组合导航优点是AGV能适应各种使用场景中的导航方式,使用相对灵活,改变路径也比较容易,因此在各行业的应用会越来越广泛。
3. AGV导航技术应用
3.1. 固定路径导航
潘坚栋等 [14] 为了解决悬吊轨移式喷灌机存在的投资高、需要复杂的基建结构等的缺点以及目前大型温室领域AGV的研究不足,采用磁带导航方式来设计喷灌机导航控制系统,为大型温室地面移动式喷灌机的设计和应用提供了指南。许柏杨等 [15] 采用磁钉AGV导航技术,将目前的位姿信息与预定路径比较得到目前的一个航向偏差,输入到比例-微分(Proportion-differential, PD)中,输出AGV的位姿调整量,在用卡尔曼滤波算法估计带有噪声干扰的状态,来提高AGV的定位精度。王跃全 [16] 根据工程实践,对AGV磁钉导航系统的安装定位方法进行了研究,将其应用到洋山深水港全自动化集装箱码头中。李昌斌等 [17] 为了使AGV小车满足高效运行、适用性等的需求,在AGV小车上采用了红外导航技术,在系统通信控制上采用了ZigBee技术,在障碍物检测上采用了光电传感器,通过实验证明出了AGV小车的高效性能,可用于无人仓等多种场合。张艳等 [18] 在AGV导航和定位中采用的位置是Data matrix二维码的显著特征和预存在二维码中的信息,用二步纠偏法对导航方向进行纠正,实现对多个站点停靠的定位精度。于娟 [19] 在AGV系统中采用了QR二维码技术,再加上运用了单源最短路经算法Dijkstra算法和经典的动态规划算法Floyd算法相结合的方法,应用在仓储物流中,解决了AGV在导航方式中的轨迹跟踪和定位精度问题。
固定路径导航有着成本低、运行路线明显、原理简单可靠的优点,但易受外界物质的影响,且不易改变路径,不适用于在复杂动态的场景下。
3.2. 自由路径导航
吕俊燕等 [20] 采用了激光导航技术结合AGV叉车的设计,将其应用在了自动化立体仓库中,激光靶点的设计使得AGV叉车的定位精度更高,运行路线更顺畅,提高了仓库利用率。姜伟 [21] 利用反光板的位置坐标定位,将确定的权重函数和权重因子引入到三边组合测量法中,提出了一种改进的激光导航AGV定位方法,并在齿轮箱自动拆装生产线上进行应用,兼顾了计算效率和定位精度。徐庆等 [22] 将具有高精度优势的视觉导航系统应用于AGV中,设计了基于快速响应码(QR Code)二维码的视觉导航AGV系统,有效修正控制了AGV站点位置和航向角误差,且能够保持稳定可靠的运行。李斌等 [23] 采用了基于深度学习的目标检测及定位方法,关键帧用YOLO算法检测,非关键帧用ORB特征点和卡尔曼滤波相结合的方式定位,对定位结果是否准确用巴氏系数来判断,应用在工业自动化运输中,解决了AGV存在的定位速度慢、自动化效率低的问题。张建鹏等 [24] 提出了一种多窗口实时测距的视觉导引AGV精确定位技术,将定位过程进行划分,逐阶段进行,最后实现精确定位。王亚伟 [25] 为了解决我国AGV在路径规划中定位精度不高的问题,采用了激光导航SLAM的方式,实现了AGV在未知环境下的导航。郭娜等 [26] 将GPS导航应用在插秧机作业控制系统中,能使得机器自动控制在田间的作业任务和行驶速度,实现了农业智能化。袁斌等 [27] 将惯性导航在AGV上使用的控制策略从传统方式改为了卡尔曼滤波惯性导航,在短距离AGV运动过程中轨迹精度提高了很多,不仅提高了AGV定位导航的能力,解决了AGV定位精度低、纠偏能力差的问题。
自由路径导航有着路径自由、灵活规划、定位精度高的优点,但成本较高,误差会随着时间累积。
3.3. 组合导航
李凤娥等 [28] 将基于磁钉技术与惯性导航的AGV组合导航系统应用于国内某在建的自动化集装箱码头中。吴文军等 [29] 采用激光导航和红外导航的AGV组合导航方式运输火工品货物,提高了运输效率和导航精度,降低了生产成本,实现了运输过程的自动化。周宗锟等 [30] 将激光雷达和二维码地标组合导航的方法应用于AGV室内定位导航,实现了AGV在单一环境特征区域下的精准实时定位与导航,使其工作环境更加多样。张晓霞等 [31] 为了使AGV在运动过程中能够高精度、实时定位导航,采用了基于GPS/DR信息融合的AGV导引系统,实验证明了该组合导航系统可以提供实时、稳定且可靠的数据。芦姝冰等 [32] 针对双轮差速驱动的AGV运动路径偏差控制,提出了采用二维码导航技术与惯性导航相结合的双摄像头扫码的方法,有效降低了导航路径的误差,提高了AGV运动轨迹的精度。吴建文等 [33] 将视觉ArUco标签与惯性导航系统进行组合,将其应用于国内某铁路物流园内集装箱AGV转运中,提高了AGV定位导航的精度。肖献强等 [34] 针对AGV在智能制造领域应用过程中存在的导航精度和路径柔性配置受限等问题,采用了基于惯性和视觉的AGV导航方法,使得两种技术的优势进行互补,来实现在导航定位上的高精度,提高AGV的可靠性。何珍等 [35] 提出将多目视觉与激光组合导航的精确定位方法,AGV的定位精度有明显的提高,鲁棒性更好。白彪才等 [36] 提出了一种自主式组合导航系统,用惯性导航系统结合地埋RFID标签,以减小惯性导航系统的累计误差,来提高AGV定位精度。李培森 [37] 针对单一定位导航技术存在的缺点,无法满足AGV在复杂的仓储环境中定位高精度的要求,采用了惯性导航系统(Inertial Navigation System, INS)/超宽带(Ultra Wide Band, UWB)/地标组合的方法,将三种技术的优势相结合,有效提高了定位精度。
总体来看,AGV作为一种先进的自动化搬运工具,已经被越来越多的行业采用。虽然AGV的导航方式有很多,但各有各的不足和优势,再加上环境越来越复杂动态且多变,导航的精度还需要进一步提高,需要根据实际使用场景选择合适的导航方式。
4. 结论
本文将AGV定位导航技术分别从“固定路径导航”、“自由路径导航”和“组合导航”三个方面进行讲述,重点分析了每种方法的理论基础、优缺点和应用现状。在智能生产与智慧物流的背景下,随着科学技术的发展,现存的AGV导航技术仍然存在不足,在效率与精度上不能实现两最优,尤其是在大规模未知的复杂环境中,AGV导航技术在精度和实时性上还需进一步提高。为了更好地适应在复杂、动态作业环境下的各个行业,满足更高的要求,AGV导航技术面临着新任务和新挑战,将朝着柔性高、精度高和可靠性强的方向发展,而与5G、云计算、物联网技术等的交互融合将会使得性能有所提高,进而提高AGV的环境感知与建模能力、自主决策能力和智能化,能更好地躲避障碍物,实现更自主的移动,提高效率与精度。
基金项目
国家自然科学基金青年基金“低计算量高精度半结构化环境视觉/惯性紧组合的AGV定位导航方法研究”(61803035)。
NOTES
*通讯作者Email: qinghuasu@126.com