1. 引言
《自动控制原理》课程是控制论与工程技术相结合的一门课程,着眼于使学生系统地掌握自动控制的理论基础,并具备对简单系统进行定性分析、定量评估和动态仿真的能力,能够应用其中知识去分析和设计工程系统。作为生物医学工程专业的一门专业基础课,该门课程理论性较强、数学公式多、且推导计算过程繁琐枯燥。
习近平总书记在全国高校思想政治工作会议上强调:把思想政治工作贯穿教育教学全过程,开创我国高等教育事业发展新局面 [1] [2] [3] [4] 。为了挖掘该门课程的思政元素,强化课堂教学的思想引领 [5] [6] [7] ,创新思政教学的方式方法,达到思政教育春风化雨无声的效果,本文以《自动控制原理》课程章节“控制系统的时域性能分析”为例,将新型电动轮椅的速度控制系统作为分析对象,融入课程思政元素,激发学生们对于生物医学工程的专业的责任心和使命感。
2. 课程思政育人元素的挖掘
2.1. 设计思路
在课程章节“控制系统的时域性能分析”中,首先复习控制系统的时域数学模型、控制系统数学模型的建立、以及自控系统的三个基本要求:稳定性、快速性、准确性。而为了评估自控系统的性能好坏,方法之一就是对控制系统进行时域性能分析。由此引出本节课的学习内容。
学习控制系统的时域分析,步骤如下:先规定典型输入信号,再求系统在典型信号输入的时域响应,最后根据时域响应分析系统的性能指标。控制系统的时域性能评估主要从稳定性、快速性和准确性三个方面入手。控制系统的时域分析内容包括:稳态性能指标、动态性能指标、稳定性分析。其中,动态性能指标通常在阶跃函数作用下进行测定或计算,包括:上升时间、调节时间、延迟时间、峰值时间、超调量。稳态性能指标包括稳态误差。分别阐述以上各个性能指标的定义和计算公式。
在讲解上述理论知识的基础上,以新型电动轮椅的速度控制系统的时域性能分析计算为例,讲解时域性能指标分析的方法和步骤。首先,需要建立新型电动轮椅的数学模型;在此基础上,计算系统的单位阶跃响应;然后,根据时域性能指标的定义计算各性能指标。通过以上案例的讲解,从而使学生掌握如何采用本课程的知识去分析和评估工程系统。
在课程知识点讲解的基础上,以新型电动轮椅的发展历史、发展现状和发展趋势为切入点,进而分析阐述国内医疗器械行业的发展历史和面临的挑战。一方面树立学生的民族自信心与自豪感,增强对国内医疗器械行业的认同感和归属感;同时,也应认识到国产医疗器械与国际上存在的差距与不足,鼓励学生努力学习提高自身的专业技能,投身于医疗器械产品的设计研发,树立生物医学工程专业学生的专业素养和责任心。
2.2. 思政育人目标
思政育人目标设定为:让学生树立医疗器械从业者的爱国情怀和使命担当,激发学生努力充实自己,掌握更多专业知识和技能,为国产医疗器械的发展贡献自己的力量。使学生们认识到:国内医疗器械行业的发展离不开每个生医人的奋斗。不负韶华,有所信方能行远。
3. 教学方法设计与实施过程
3.1. 课堂知识点的引入
在讲解控制系统的时域性能分析的理论之后,以电动轮椅车速控制系统为例,分析其动态性能指标和稳态性能指标。该新型电动轮椅适用于颈部以下有残障的人士,可根据使用者的头部动作实现轮椅车的速度控制,即在头盔上安装了4个间隔90度的速度传感器,用来指示前、后、左、右四个方向,头盔传感器的综合输出与头部运动的幅度成正比。首先需要建立电动轮椅的数学模型。
头盔上传感器的数学模型为:
(1)
控制电路中放大器的数学模型为:
(2)
轮椅车的动力学模型为:
(3)
电动轮椅车速控制系统简化的结构图模型如图1所示:

Figure 1. Structure diagram of speed control system of electric wheelchair
图1. 电动轮椅车速控制系统的结构图
基于以上结构图模型,计算系统的闭环传递函数如下:
(4)
当k设置为5时,系统的阶跃响应曲线如图2为:
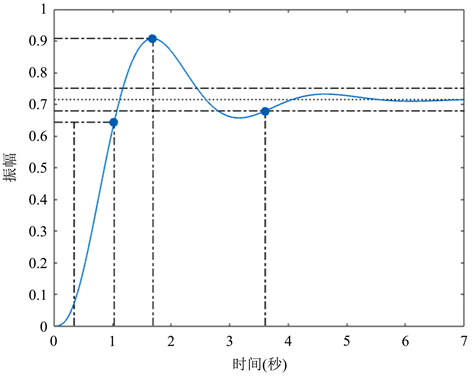
Figure 2. Step response curve of speed control system of electric wheelchair
图2. 电动轮椅车速控制系统的阶跃响应曲线
计算各个性能指标,如下:
超调量
;
峰值时间:
;
上升时间:
;
调节时间:
(误差带
);
综上可知,车速控制系统是稳定的,已完成系统动态性能指标的分析。
3.2. 电动轮椅车速控制系统的基本原理与时域分析法
电动轮椅的控制系统是一种反馈式控制系统,引导同学们复习已学习过的知识点:反馈的含义、反馈控制系统的定义、控制系统的几种基本控制方式等。
对于线性控制系统,常用的分析方法包括:时域分析法、根轨迹法、频域分析法。时域分析法具有直观准确的优点,可以提供系统时间响应的全部信息,尤其适用于低阶系统。随后,针对电动轮椅车速控制系统的结构图和时域性能指标,对电动轮椅车速控制系统进行分析计算。并且进一步引导学生思考分析:当改变放大器的放大增益k值时,速度控制系统的性能指标如何变化,对整个控制系统的性能有哪些方面的具体影响,由此得到提高控制系统快速性的方法。
3.3. 思政育人要素的融入
在讲解课程知识点的基础上,引入国内智能电动轮椅的发展现状和发展趋势。国内对智能电动轮椅的研究起步较晚,但近几年发展较快。目前面临的瓶颈和挑战如下:
首先,人机交互智能化程度不够,大多采用传统人机接口对轮椅进行简单控制,无法快速准确地理解操作者的思维和命令。其次,轮椅的多地形适应能力较差。第三,智能电动轮椅控制系统的实时性有待提高、功耗较大、续航能力不高。
鉴于以上因素,我们认为智能电动轮椅未来的发展趋势有很大的提升空间。借由新型电动轮椅的发展现状和发展趋势讲解,延伸到国产医疗器械的发展,从而使学生明确:近年来,国产医疗器械的研发水平已经取得了长足进步,攻克了许多技术难关,正处在飞速发展的过程中,但是与国际上还存在一定的差距,随着我国科技的进步,这种差距有望进一步缩小。国产医疗器械行业能否实现弯道超车,能否达到国际领先水平,这都需要我们每一个人为之努力奋斗。
在分析轮椅车速度控制系统的动态性能指标时,可以发现:放大器增益,即系统开环增益的增加,对稳定性是不利的,但可以加快系统的动态响应,且当稳态误差为常数时可减小稳态误差值。由此可见:控制系统的稳定性、稳态误差、动态性能有时是相互制约的,这就要求全面地考虑问题,有大局意识,抓主要矛盾。
4. 教学效果分析与思考
通过分析新型电动轮椅的速度控制系统的时域性能指标,将课程思政元素穿插在课堂知识点的讲授中,培养学生的专业责任感和使命感。可进一步引导学生认识到:作为生医专业的本科生,是我国医疗器械行业发展的基石和新生力量,只有不断提高自身的专业技能和素养,才能为医疗器械产品的研发贡献力量。医疗器械的研发任重而道远,我们在路上,并且义无反顾、脚踏实地走下去。
本次课程结束之后,通过采用调查问卷的反馈方式,学生表示:不仅能从这门课程中掌握反馈控制系统的基本工作原理、线性控制系统的时域分析方法,更能从中感受到国产医疗器械行业的飞速发展,以及医疗器械行业中存在的机遇与挑战,需要我们不断提高自身的专业素养,不负使命与担当,实现自身的社会价值。
基金项目
上海理工大学课程思政领航学院项目,上海理工大学课程思政建设项目。
NOTES
*通讯作者。