1. 引言
培养和造就大批德才兼备的高素质人才,是国家和民族长远发展大计,习近平总书记在中央人才工作会议上发表的重要讲话,深刻回答了为什么建设人才强国、什么是人才强国、怎样建设人才强国的重大理论和实践问题,党的二十大报告提出,“深入实施人才强国战略”。 [1] 高素质创新型人才的培养需要加强和提升课堂教育质量,当然也离不开理论与实践相结合的学科竞赛。学科竞赛是超出课本范围的一种特殊的考试和竞赛,可以有效锻炼人的智力与意志 [2] 。通过参与学科竞赛,学生可以开阔视野,扩充知识,同时可以在一些竞赛中将课堂所学的书本知识与动手实践能力相结合,加深对书本知识的理解,有效提高自身的观察能力和创新能力,锻炼学生自主思考与独立解决问题的能力 [3] 。另一方面,通过组织学科竞赛的培训、指导,教师们也能进一步提升自己的教学水平,深入了解学生对学科知识的掌握程度,促进教学改革的开展 [4] 。
全国大学生光电设计竞赛是由中国光学学会和教育部高等学校光电信息科学与工程专业教学指导分委员会主办的一项全国性重要赛事,是高校光电类专业的顶级比赛,正努力打造成公认的光电专业领域规模最大、影响力最大的一项具有导向性、示范性的全国学科竞赛。赛事为普及光电知识、引导光电科学探索、促进光电科研实践、促进高等教育改革和人才培养,提供了国家级的权威交流平台。本文以指导参加的第十一届光电设计竞赛智能小车赛题为例,从竞赛分析切入,介绍了如何完成赛题任务规划和竞赛过程指导,为旨在参加相关学科竞赛的队伍提出了一些参赛建议。
2. 赛题内容
全国大学生光电设计竞赛每两年举办一次实物竞赛,第十一届竞赛哈尔滨工业大学承办,此届赛题分为赛题1“酒精浓度的非接触测量”和赛题2“迷宫寻宝”光电智能小车,参赛队伍任选其一进行比赛。
本文以“迷宫寻宝”光电智能小车为例进行介绍。竞赛要求智能车由参数队伍自备,只能一键启动,通过光电传感寻找、判断迷宫中的真、伪宝藏,并在完成寻宝后走出迷宫。竞赛迷宫场地如图1所示。竞赛为淘汰制,采用红、蓝对抗的形式,即每场比赛红、蓝两队在同一迷宫中比拼、对抗。每场比赛,双方各有3个与队色相近的多米诺骨牌为己方宝藏,另有红、蓝各1个骨牌牌面有贴纸的伪宝藏,宝藏与伪宝藏的位置按藏宝图随机摆放、双色交错对称,即迷宫的上下左右四个象限区域内各放置1个红色和1个蓝色宝藏。车比赛胜负依据各自的寻宝数、误判数、是否走出迷宫、耗时等确定。胜负判定的优先级为:寻宝数 > 耗时 > 中断次数。若双方分数不同,寻宝数多的一方获胜;双方分数相同,且至少有一方抵达出口,则耗时更短走出迷宫的队伍获胜。若比赛时间耗尽,双方均未走出迷宫、且分数相同,则率先得分的一方获胜。
3. 赛题任务规划
赛题的任务规划是竞赛前期准备工作的重要组成部分,需要确定竞赛的技术路线方向,决定了竞赛执行的难易程度,在一定程度可以决定竞赛的最终结果。任务规划过程如图2所示,在拿到赛题之初首先需要认真审题,对赛题任务进行拆解分析,把握赛题的重点与难点,然后结合本队伍特点,认真规划实施竞赛的技术路线,将拆解的任务逐个细化并串联起来,确保设计方案的顺利执行,最后依据划定的技术路线,将设计的方案逐个映射成系统结构,确定竞赛的硬件平台,最终完成竞赛任务目标。以此次光电设计竞赛为例,在仔细阅读竞赛规则后,带领学生进行了如下任务分析、路线规划及系统构成解析。

Figure 2. The task schedule of discipline competition
图2. 赛题任务规划
3.1. 赛题任务分析
智能车需要完成迷宫的藏宝图识别,并通过光电传感的方式巡线寻找宝藏,需要判断找到的宝藏是否为己方宝藏并判别宝藏的真伪,并且要在完成寻宝后走出迷宫。通过分析,赛题需要完成任务有藏宝图识别,路径规划,宝藏识别,巡线搜索四个模块。根据这四个模块得到的信息对小车的运动进行控制,实现宝藏寻找和识别的功能。
3.2. 技术路线规划
赛题任务分为四个部分;藏宝图识别、路径规划、宝藏识别、巡线搜索。首先,小车通过摄像头拍摄藏宝图,运用边缘检测算法识别藏宝图路径与宝藏位置坐标,然后,车载处理器运行路径规划算法,搜寻离起点最近的宝藏坐标点,通过局部路径规划算法获取从起点至最近宝藏点的轨迹信息,并依据坐标关系计算得到每一个直角拐点处的转弯指令,控制小车转弯方向。接着,小车通过七路灰度传感器对迷宫道路中间铺设的黑线进行识别,根据传感器的输出结果进行巡线和拐角识别操作,结合已经生成的转弯指令控制小车在识别到拐角时完成转弯,操控小车运行至宝藏的目标点位置。最后利用摄像头结合自制的照明灯控制亮度进而准确识别宝藏类型,判别敌我宝藏,以此为先验信息并结合已知宝藏中心对称分布的特性,运用全局路径动态优化算法,选择小车的下一目的宝藏点。重复上述过程直至找到所有我方宝藏,并最终到达迷宫出口位置。技术路线规划方案如图3所示。
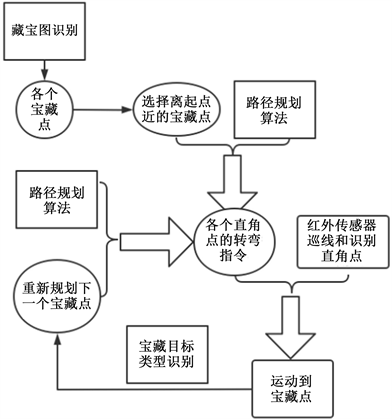
Figure 3. The flowchart of technical path
图3. 技术路线的流程图
3.3. 构成系统分析
通过大量调研与小组讨论,在系统构成方面,决定采用树莓派4b作为处理器,以七路灰度传感器作为循迹模块,采用英伟达Jetson系列高清摄像头作为图像识别的模块,通过PWM驱动金属齿轮直流电机的方式使小车运动。将路径规划和图像识别的算法均部署到树莓派中,控制小车的运动和宝藏的搜索与识别。通过车载摄像头识别藏宝图得到坐标后,点击树莓派运行,然后通过树莓派上的按键一键触发系统程序运行,小车进行路径规划、巡线运动和识别目标撞击。竞赛选用小车如图4所示。

Figure 4. Intelligent car selected for the competition
图4. 竞赛选用的智能小车
4. 竞赛实施过程管理
从赛题发布到现场竞赛大约会持续5个多月,在如此漫长的时间里,竞赛实施过程的管理很大程度上决定了竞赛的成败。过程管理起于竞赛任务分配,使队员之间既相互配合又独立完成任务,终于关键技术攻关,在规划的时间节点内,攻克一项项关键技术难点,就能够在竞赛中取得较好的成绩 [5] 。以此次竞赛过程管理为例,站在指导老师的角度深度解析竞赛实施过程管理的要点。竞赛中的技术难点解析框图如图5所示。
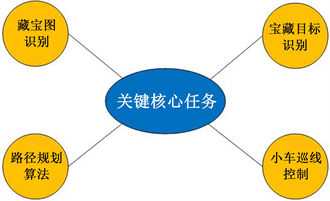
Figure 5. Analysis of technical key issues in competitions
图5. 竞赛中的技术难点解析
4.1. 竞赛任务分配
过程管理首先体现在竞赛任务分配上,好的任务规划将起到事半功倍的效果,能够将队员与队员、队员与赛题有机结合在一起。在人员构成方面,光电设计竞赛可以由三名参赛队员,两名指导老师,队员中至多可以有一名研究生参与,研究生不能担任队长,参赛队长建议由高年级的本科生担任,能够起到承上启下的作用。
本赛题主要包括了藏宝图识别、宝藏目标识别、路径规划算法以及小车巡线控制等四个部分,通过任务拆解,发现四部分任务相互独立,涉及不同的知识领域,其中藏宝图识别与宝藏目标识别属于数字图像处理的范畴,需要用到点和线的检测、颜色识别等算法;路径规划算法需要深度解析利用赛题具体要求,是一种带约束条件的动态数学优化算法;而小车巡线控制则要结合硬件平台,完成巡线传感器信号读入、小车电机控制与撞击识别到宝藏等过程,难点在于传感器的选型和小车的拐弯操作。任务分配需要依据模块化的任务规划和技术路线,结合参赛队员的知识结构特点,路径规划算法在本设计中具有承前启后的作用,因此将该任务分给了队长,藏宝图和宝藏的识别是该项竞赛的先导性任务,交付给具有光电数字图像基础的本科学员,小车巡线控制工作相对较难,任务繁杂,需要队员具有扎实的硬件编程与调试功底,遂将该任务分配给了具备一定工程项目开发经验的研究生队员。
在分配任务后,成员需要通过定期开展小组会议的方式加强交流,交流内容包括项目进展、完成任务过程中遇到的难题,并讨论解题思路等,组会能够有效实现队员与队员、队员与指导老师之间的交流沟通,督促学员实现阶段性目标,在遇到技术难题时,相互鼓励,相互帮助,竞赛前期组会可以两周组织一次,到了临近的两个月则一周组织一次,增加交流与联调频次。在上述过程中,指导老师应当起到粘合剂的作用,前期任务分配上主动跟学生交流,讲解每名队员承担任务的侧重点,指明学习与研究方向,并详细介绍不同任务之间应如何传递参数,如何关联,将队伍粘合成一个有机整体。
4.2. 关键技术攻关
竞赛是对学生综合能力的锻炼,是运用课本知识解决生活实际问题的实践活动 [6] ,也是有效拓宽专业技能的有效手段。在竞赛过程中,必然会遇到各种技术难题,如何解决技术难题、完成关键技术攻关是学科竞赛的核心组成部分。在技术攻关过程中,队员之间相互帮助取长补短,而指导老师则要及时掌握学生的动态,在关键的节点上予以指导或引导学生解题思路,起到点睛的作用。
4.2.1. 藏宝图识别
利用摄像头拍得藏宝图图片后,首先将图片转换为灰度图像,确定四个角上的定位框的位置,再使用Canny边缘检测算法获取图像边缘,筛选出所有的正方形,最后再从所有的正方形中筛选出符合包含关系条件的正方形,确定为定位框。然后,利用定位框的位置进行透视变换矫正并裁剪。最后,在矫正的图像中,进行先膨胀后腐蚀的开运算处理,识别提取藏宝图中的轨迹线(直线)与宝藏位置点(圆点)位置坐标,并将坐标传递给路径规划算法。藏宝图识别的关键技术难点在于熟练灵活运用图像处理领域的检测识别算法。
4.2.2. 宝藏目标识别
根据骨牌的颜色和对应的形状,宝藏类型可分为四种:红方宝藏、红方伪宝藏、蓝方宝藏、蓝方伪宝藏。宝藏骨牌的识别采用hsv颜色模型对骨牌进行颜色和图案形状进行判定 [7] ,首先获知四种骨牌的颜色对应的hsv颜色的范围,当作判定对应颜色的阈值。然后先对图像进行高斯模糊处理,再将处理后的图像转为hsv模型的图像。然后根据己方的红蓝属性判定,若己方为蓝(红)方,则先进行黄色(绿色)的掩膜处理,接着进行先腐蚀后膨胀的闭运算处理,最后再进行一次高斯模糊处理。宝藏目标识别的关键技术难点在于如何提高颜色识别的适应性、鲁棒性和准确率,颜色的识别极易受到周围光线的影响,为了降低环境的制约,在对宝藏拍照前开启补光灯,在提高鲁棒性和准确率方面则采用了像素点统计的方法,减少局部点检测带来的错误概率。
4.2.3. 路径规划算法
本次比赛小车的路径规划,分为局部规划与全局规划两部分。其中局部路径规划为根据已知两坐标点的位置信息,结合改进的A*算法 [8] ,实现两点的路径选择;全局规划为根据小车运动过程中对宝藏的识别结果,动态更新我方宝藏的位置分布,在已知所有我方宝藏位置的基础上进行宝藏探索。路径规划算法的难点在于如何根据当前获得的先验宝藏坐标位置信息完成动态路径规划,为小车寻找走出迷宫的最短路径。
4.2.4. 小车巡线控制
在尝试了视觉摄像头、红外传感器与灰度传感器等巡线传感器后,队伍决定采用灰度传感器作为迷宫中的黑色引导线识别模块。灰度传感器是一种具有较强抗干扰能力的光电传感器,其发射管的光源采用高亮白色聚光LED,发射管端发出的光线通过不同环境背景的反射之后,最终由光敏接收管来接收,光敏接收管的阻抗随反射光线的强弱变化而变化(反射光线越强,阻值越小),最后通过信号采集电路区分黑线与白色背景。智能小车巡线控制的关键技术难题在于提高在路径拐点处的识别率以及加快小车拐直角弯的速率,拐点处识别可以通过灰度传感器引脚中断的方式进行响应,而拐弯速度则采用麦克纳姆轮差速转弯及提高电机控制功率的方式改善。
5. 结束语
学科竞赛是提高学生综合素质、培养学生创新能力的重要手段,在学科竞赛过程中,科学的方案实施与过程管理对竞赛结果至关重要,站在指导教师的角度,竞赛之初应当带领学生认真审题,完成任务分析、规划技术路线并分析系统构成,在完成竞赛的过程中,则需要引导学生进行任务分配、协助关键技术攻关,掌握学生的心里状态,以定期小组开会的方式掌握队员的项目进展并讨论解决技术难点,指导老师需要起到队伍粘合剂及领路人的作用。
NOTES
*通讯作者。